Optimale kollaborative Positionierung (GRK 2159, Thema 4)
| Leitung: | Prof. Dr.-Ing. Steffen Schön |
| E-Mail: | garcia@ife.uni-hannover.de |
| Team: | M.Sc. Nicolas Garcia Fernandez |
| Jahr: | 2016 |
| Förderung: | DFG |
| Ist abgeschlossen: | ja |
| Weitere Informationen | https://www.icsens.uni-hannover.de/de/forschung/dissertationsprojekte/ |
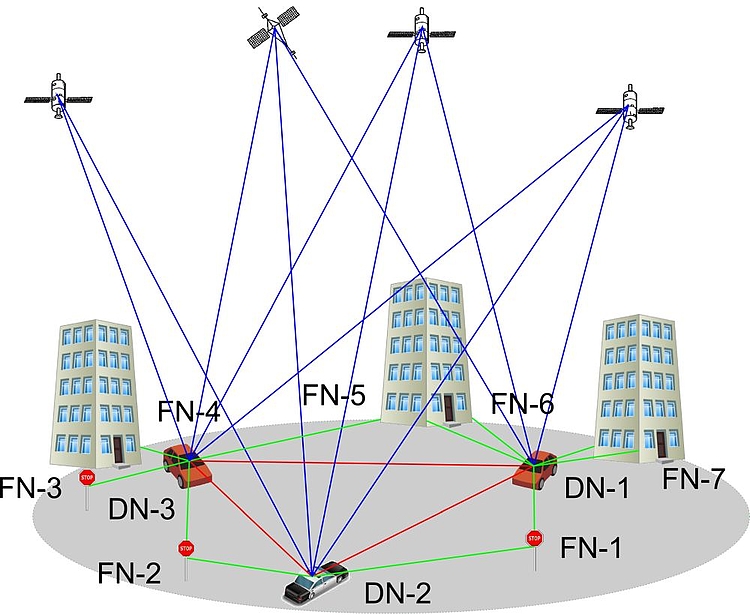
Kollaboratives Positionierung (CP) ist eine vielversprechende Technik, die auf einer Gruppe von dynamischen Knoten (Fußgänger, Fahrzeuge usw.) basiert. Diese sind mit verschiedenen (zeitsynchronisierten) Sensoren ausgestattet. Die Qualität der Positionierungs-, Navigations- und Zeitbestimmungsinformationen (PNT) kann dabei durch die Durchführung von Messungen zwischen Knotenpunkten oder Elementen der Umgebung (Stadtmöbel, Gebäude usw.) erhöhet werden.
Im Vergleich zur Einzelknotenpositionierung, z.B. mittels Einzel-GNSS oder ’Tightly coupled’ GNSS+IMU Lösungen, nimmt die Robustheit der Positionierung zu und beschreibt eine Verbesserung der Genauigkeit, Integrität, Kontinuität und Verfügbarkeit. Daher kann das Navigationssystem als ein geodätisches Netzwerk angesehen werden, in dem einige der Knoten ihre Position ändern und bei dem die Verbindungen zwischen den Knoten durch Messungen definiert werden, die mit zusätzlichen Sensoren durchgeführt werden (V2X-Messungen). Um Einblicke in das Verhalten solcher Netzwerke zu erhalten und die Vorteile von CP in Bezug auf Einzelfahrzeugansätze zu evaluieren, wurde ein realistisches Simulationstool für kollaborative Navigationssysteme entwickelt.
Wir kombinieren Satellitennavigation, Trägheitsnavigation, Laserscanner, Photogrammetrie und Odometrie, um einen Algorithmus zu erhalten, der uns dabei hilft, die Multisensordaten zu fusionieren und die Korrelationen und Abhängigkeiten der geschätzten Parameter und Beobachtungen zu bewerten. Das Simulationstool ermöglicht es uns, die Vor- und Nachteile der verschiedenen Algorithmen zur Fusion der Sensormessungen zu bewerten, die CP-Techniken ausführen können.
Die Validierung des Simulationstools mit realen Daten garantiert, dass die aus der Analyse gezogenen Schlussfolgerungen eindeutig zu einer Verbesserung der Robustheit der Schätzung führen, die in eine sichere und präzise Navigation übersetzt werden kann.





