Forschungsprojekte aus dem Bereich Positionierung und Navigation
Modellierung physikalischer Korrelationen von GNSS-Phasenbeobachtungen mit Ansätzen der Turbulenztheorie
| Leitung: | Prof. Dr.-Ing. Steffen Schön |
| E-Mail: | schoen@ife.uni-hannover.de |
| Team: | Dr.-Ing. Markus Vennebusch |
| Jahr: | 2011 |
| Datum: | 12-01-11 |
| Förderung: | Das Projekt wird gefördert durch die Deutsche Forschungsgemeinschaft (SCHO 1314/1-1). |
| Ist abgeschlossen: | ja |
Motivation
Turbulente Fluktuationen des Brechungsindex'' in den unteren Atmosphärenschichten führen zu physikalischen Korrelationen zwischen GNSS-Phasenbeobachtungen. Dieses Phänomen umfasst ebenso Very Long Baseline Interferometry (VLBI)-Messungen, als auch auch optische Messungen von Satellite Laser Ranging (SLR) oder der Digitalen Zenitkamera.
Methodik
Mit Ansätzen aus der Turbulenztheorie wurde ein Modell entwickelt, das diese physikalischen Korrelationen für GPS-Phasenbeobachtungen in Form einer vollbesetzten Varianz-Kovarianz-Matrix (VKM) angeben lässt. Die bisher erhaltenen Ergebnisse zeigen, dass
- die VKM nicht nur von der Satellitengeometrie abhängt, sondern auch von den vorherrschenden atmosphärischen Bedingungen
- die Höhe der Korrelation zwischen zwei GPS-Phasenbeobachtungen antiproportional zum Abstand der entsprechenden Strahlwege durch die turbulent Atmosphäre ist.
Basierend auf diesem Modell wurden bisher u.a. Sensitivitätsuntersuchungen sowie Simulationen von Variationen troposphärischer Laufzeitverzögerungen durchgeführt.
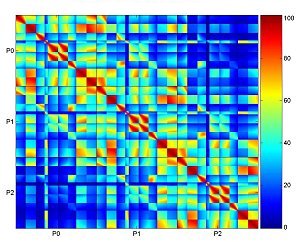
Abbildung 2: Räumliches Verhalten von troposphärischen Laufzeitverzögerungen aus ''Precise Point Positioning''-Lösungen eines 16 km langen, linienhaften Netzes von sechs GPS-Empfängern. |





