Research Projects | Positioning and Navigation
Antenna Calibration
-
Gewinn eines grundlegenden Verständnisses der Mehrwege - Antennen - Empfänger - Interaktionen zur Standardisierung der Kalibrierung von Codephasenvariationen von GNSS-EmpfangsantennenLed by: Prof. Dr.-Ing. Steffen Schön, Dr.-Ing. Tobias KerstenTeam:Year: 2022Funding: DFG, Project number: 470510446
GNSS and Inertial Navigation
-
Grant from the European Regional Development Fund (ERDF) and the state of Lower SaxonyIn this project, a DAB-to-GNSS receiving module is developed that can receive and process GNSS corrections via DAB technology. It will be tested in comparison to mobile communications. The evaluation includes quantitative and qualitative investigation of the data stream and practical tests of the module in GNSS applications. The project is a cooperation with RFmondial GmbH.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2023Funding: Grant from the European Regional Development Fund (ERDF) and the state of Lower Saxony in the funding scheme "Innovationsförderprogramm für Forschung und Entwicklung"
-
Gewinn eines grundlegenden Verständnisses der Mehrwege - Antennen - Empfänger - Interaktionen zur Standardisierung der Kalibrierung von Codephasenvariationen von GNSS-EmpfangsantennenLed by: Prof. Dr.-Ing. Steffen Schön, Dr.-Ing. Tobias KerstenTeam:Year: 2022Funding: DFG, Project number: 470510446
-
5GAPS: 5G Access to Public SpacesIn this research project, the positioning capabilities of the latest mobile communication standard 5G NR are investigated. Due to the increasing demand for communication and the widespread installation of 5G NR networks, terrestrial signal sources can provide an alternative or complement to GNSS signals when GNSS signals are unavailable or a limited by the environment.Led by: Prof. Dr.-Ing Steffen SchönTeam:Year: 2022Funding: Bundesministerium für Digitales und Verkehr (BMDV) - 45FG121_F
-
Interferometric Fibre Links (CRC 1464, A05)The overarching goal, to establish chronometric levelling as a routine tool for geodesy, requires research and developments for high precision frequency transfer in the areas of Interferometric Fibre Links (IFLs) and Global Naviation Satellite System - Frequency Transfer (GNSS-FT). The development of fieldable IFLs equipment, ultraprecise GNSS-FT and their use for chronometric levelling, are new areas of research and development, which will open up many applications of geodetic interest. We aim to realise an island-mainland chronometric levelling campaign using IFL and GNSS-FT, and the transportable optical clocks developed in A04.Led by: Prof. Dr.-Ing. Steffen Schön, Dr. Jochen KronjägerTeam:Year: 2021Funding: DFG
-
Correction of GNSS multipath effects for reliable autonomous localisation of highly automated vehicles in metropolitan areas (KOMET)The code range (code measurement) used in automotive applications often cannot provide the required resolution of the location due to the high measurement noise. The complex GNSS signal propagation (signal shading, multipath effects) in urban environments makes the determination of an accurate and robust positioning solution a particularly challenging task - e.g. for positioning in narrow street canyons. The research project aims to develop and implement innovative correction methods to reduce multipath effects in order to improve carrier phase-based GNSS positioning.Led by: Prof. Dr.-Ing. Steffen Schön, Dr.-Ing. Tobias KerstenTeam:Year: 2020Funding: BMWi / TÜV Rheinland Consulting GmbH
![]()
![]() © Ch. Skupin (Bosch)
© Ch. Skupin (Bosch)
-
FIRST: Fingerprinting, Integrity Monitoring and Receiver Signal Processing Using Miniature Atomic Clock TechnologyIn order to improve the performance of the determination of position, velocity and time by means of GNSS measurements, nowadays Chip Scale Atomic Clocks (CSACs) are frequently used, which provide a highly stable frequency signal to the GNSS receiver. However, until now, the improvement of the navigation solution has only been algorithmic. In this project, the influence of the receiver clock on the quality of signal processing in a software receiver will be investigated by adapting the internal processing steps to the high frequency stability of the CSAC signal. In addition, the feasibility of fingerprinting with highly stable atomic clocks under different dynamic conditions will be investigated and additional integrity measures for GNSS-based time transfer will be developed.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2020Funding: Bundesministerium für Wirtschaft und Energie (BMWi)
![]()
![]()
-
Collaborative Navigation for Smart Cities (GRK 2159)Global Navigation Satellite Systems (GNSS) is the only navigation sensor that provides absolute positioning. However, urban areas form the most challenging environment for GNSS to achieve a reliable position. Because of the reduced satellite visibility and disturbed signal propagation like diffraction and multipath, the resulting position has a reduced accuracy and availability. The overall research objective of this project is to reduce these shortcomings through collaboration. Therefore, similarity of multipath at different locations within streets will be studied.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2019Funding: DFG
-
QGyro: Quantum Optics Inertial Sensor ResearchThe objective of this research programme is to develop and test high-precision quantum inertial sensors that support conventional inertial navigation sensors in order to expand these sensors to up to 6 degrees of freedom and use them for autonomous navigation in various further development stages.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2019Funding: BMWi | German Aerospace Centre (DLR) - 50RK1957Duration: 2019 - 2022
![]()
![]()
-
Integrity Monitoring for Network RTK SystemsFrom the advent of the satellite positioning techniques, civil users have always been trying to find a way to have more accurate and precise coordinates of their position. Differential concepts, from early days of GPS, have been considered. Applying the RTCM format, made the transmission of corrections possible from reference stations to the users. At first stage the corrections were casted to the users from one single station, which is called single RTK (Real Time Kinematic). This method is limited in some ways; degrading by increasing distance from CORS (Continuously Operating Reference Station), needed same signals at reference and rover and remaining the reference station errors. For compensating these shortages, the Network RTK concept appeared. In NRTK the corrections are produced using a network (at least three) of reference stations. The concept of Precise Point Positioning (PPP) is currently associated with global networks. Precise orbit and clock solutions are used to enable absolute positioning of a single receiver. However, it is restricted in ambiguity resolution, in convergence time and in accuracy. Precise point positioning based on RTK networks (PPP-RTK) overcomes these limitations and gives centimeter-accuracy in a few seconds.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2018Funding: DAAD
-
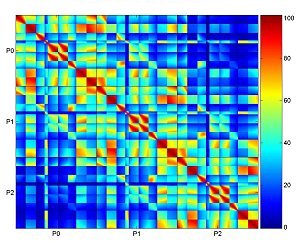
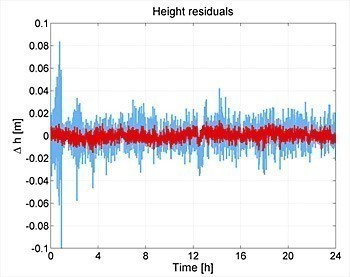
Kinematic GNSS positioning of Low Earth Orbiters (CRC 1128, B03)Strengthening the accuracy of kinematic orbits of Low Earth Orbiters through an adopted Precise Point Positioning (PPP) enhanced by GNSS Receiver Clock Modeling and the concept of a Virtual Receiver is the overall objective of this project.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2014Funding: DFG
![]()
![]()
-
Turbulence investigations and improved modelling of atmospheric refraction with VLBI and GNSSImproved characterization of refractivity fluctuations, determination of turbulence parameters and enhanced modelling of neutrospheric refraction effectsLed by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2012Funding: DFG (SCHO 1314/3-1)
-
Verbesserte Positionierung und Navigation durch konsistente Multi-GNSS AntennenkorrekturenInvestigation of effects of code phase delays (GDV) on the GNSS-based positioning and navigation as well as the development of a method for an adequate comparison of different calibration results.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2012Funding: BMWI | 50NA1216
![]()
![]()
-
Modelling physical correlation of GNSS phase observations by means of turbulence theoryModelling of physikal Correlations on GNSS Phase Observables using the Approach of turbulence theoryLed by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2011Funding: DFG (SCHO 1314/1-1).
![]()
![]()
-
Modeling and correction of GNSS multipath effect through Software receiver and Ray tracingDescribing Multipath by Software receiver and Ray tracing.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2011Funding: BMWI and German Aerospace Center (DLR)
-
Bürgernahes FlugzeugImprovement of quality and decrease of signal loss during GNSS-based curved landing approaches as part of the development of a "Metropolitain Aircraft".Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2011Funding: Government of Lower Saxony
![]()
![]()
-
Navigation und Positionierung in difficult enviornmentsAnalyse of High-Sensitivity GNSS SensorsLed by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2011
![]()
![]()
-
Assessment of remaining systematic effects by interval mathematicsAssessment of remaining systematic effects by interval mathematicsLed by: Prof. Dr.-Ing. Steffen SchönYear: 2006Funding: Deutsche Forschungsgemeinschaft (DFG)
-
Investigations of distance dependent systematic effectsCorrection models for distance dependent effects in small GPS networksLed by: Dr.-Ing. Steffen SchönTeam:Year: 2006












QUEST
-
Satellite Navigation using high precise OscillatorsExamination of high precise Oscillators in the application area of Satellite NavigationLed by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2011Funding: QUEST
![]()
![]()
CRC 1128 (geo-Q)
-
Kinematic GNSS positioning of Low Earth Orbiters (CRC 1128, B03)Strengthening the accuracy of kinematic orbits of Low Earth Orbiters through an adopted Precise Point Positioning (PPP) enhanced by GNSS Receiver Clock Modeling and the concept of a Virtual Receiver is the overall objective of this project.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2014Funding: DFG
![]()
![]()





