EXC-2123 QuantumFrontiers
-
Relativistische Untersuchungen mit LLR-DatenLeitung: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2019Förderung: Exzellenzstrategie des Bundes und der Länder – EXC-2123 QuantumFrontiers (DFG)Laufzeit: 2019 - 2025
-
Differentielles Lunar Laser RangingLeitung: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2021Förderung: Exzellenzstrategie des Bundes und der Länder – EXC-2123 QuantumFrontiers (DFG), DLR-SILaufzeit: 2021 - 2022
CRC 1464 (TerraQ)
-
Gravitationsfeldlösung durch Ausschöpfung des vollen Potentials der GRACE Follow-On Mission (SFB 1464, C04)Das übergeordnete Ziel dieses Projekts ist es, die Daten der GRACE und GRACE-FO Satellitenmissionen optimal auszuwerten. Mit diesen Daten sollen die zeitlichen Variationen auf Monats- bis Tagesebene des Schwerefeldes mit bestmöglicher Auflösung bestimmt werden.Leitung: Dr. Matthias Weigelt, Prof. Dr.-Ing. Torsten Mayer-GürrTeam:Jahr: 2021Förderung: DFG
-
Terrestrische Uhrennetzwerke: Grundlagenphysik und Anwendungen (SFB 1464, C02)Die stetige Verbesserung von optischen Uhren und deren Vergleich über lange Distanzen mittels Glasfaserkabel werden, besonders in TerraQ, hochgenaue terrestrische Uhrennetzwerke für Anwendungen in der Geodäsie möglich machen. Damit kann und wird sich das chronometrische Nivellement als neue geodätisch Messemethode etablieren. In diesem Projekt wird einerseits der allgemein-relativistische Formalismus für die uhrenbasierte Geodäsie in Strenge weiterentwickelt und auf Uhrennetzwerke angewendet, um die Vor- und Nachteile verschiedene Konstellationen und Messverfahren bewerten zu können. Darauf aufbauend werden die interessantesten Anwendungen von Uhrennetzwerken in der Geodäsie und der Grundlagenphysik identifiziert.Leitung: Prof. Dr.-Ing. Jürgen Müller, Prof. Dr. Claus LämmerzahlTeam:Jahr: 2021Förderung: DFG
-
Optische Uhren für chronometrisches Nivellement (SFB 1464, A04)Wir werden das Potenzial des chronometrischen Nivellements demonstrieren, indem wir gemeinsam mit Teilprojekt A05 Höhenmessungen mit der gleichen oder sogar besseren Auflösung demonstrieren, als sie das geometrische Nivellement oder der Global Navigation Satellite System (GNSS)/Geoid-Ansatz derzeit erreichen können. Darüber hinaus wird die Methodik in Zusammenarbeit mit TerraQ-Teilprojekten eingesetzt, die gravimetrische und GNSS-Techniken nutzen, um z.B. Wasserspeichern zu überwachen. (Projekte: Terrestrische Uhrennetzwerke: Grundlagenphysik und Anwendungen (C02), Modellierung von Massenvariationen bis zu kleinen Skalen (C05), und Atmosphäre-Ozean Hintergrundmodellierung für terrestrische Gravimetrie (C06)).Leitung: PD Dr. Christian Lisdat, Prof. Dr. Piet O. Schmidt, Dr.-Ing. DenkerTeam:Jahr: 2021Förderung: DFG
-
Interferometrische Glasfaserverbindungen (SFB 1464, A05)Um das chronometrische Nivellement als Routinewerkzeug für die Geodäsie zu etablieren, sind Forschung und Entwicklungen für hochpräzise Frequenzübertragung in den Bereichen Interferometrische Glasfaserverbindungen (Interferometric Fibre Links, IFLs) und Globales Navigationssatellitensystem - Frequenztransfer (GNSS-FT) erforderlich. Die Entwicklung von feldtauglichen IFLs-Geräten, ultrapräziser GNSS-FT und deren Einsatz für chronometrische Nivellements sind neue Forschungs- und Entwicklungsgebiete, die viele Anwendungen von geodätischem Interesse eröffnen werden. Unser Ziel ist es, eine chronometrische Nivellement-Kampagne zwischen Insel und Festland unter Verwendung von IFL und GNSS-FT sowie der in Teilprojekt A04 entwickelten transportablen optischen Uhr zu realisieren.Leitung: Prof. Dr.-Ing. Steffen Schön, Dr. Jochen KronjägerTeam:Jahr: 2021
-
Modellierung von Massenvariationen mit hoher räumlicher und zeitlicher Auflösung (SFB 1464, C05)Beobachtungen der zeitlichen Variationen des Erdschwerefeldes mittels Satellitengravimetrie, terrestrischer Gravimetrie und durch mit GNSS gemessenen Auflasteffekten erlauben einen Einblick in die regionalen Variationen und Veränderungen von Wasserspeichern auf jeweils unterschiedlichen räumlichen und zeitlichen Skalen. Das Ziel dieses Projekts ist die Entwicklung von Schwerefeldmodellen mit größtmöglicher räumlicher und zeitlicher Auflösung durch die konsistente Kombination der verschiedenen Beobachtungsverfahren. Diese gleichmäßige Einbeziehung der verschiedenen geodätischen Sensoren ist aufgrund der unterschiedlichen räumlichen und zeitlichen Sensitivität der Messsysteme eine der größten Herausforderung der Geodäsie.Leitung: Prof. Dr.-Ing. Annette Eicker, Prof. Dr. Andreas Günther, Dr. Matthias WeigeltTeam:Jahr: 2021Förderung: DFG
-
Quantengravimetrie (SFB 1464, A01)Im Rahmen von TerraQ soll die auf der Atomchip-Technologie basierende Quantengravimetrie mit Bose-Einstein-Kondensaten (BECs) etabliert und ihr Potenzial für die mobile Gravimetrie erforscht werden. Mit dem in Laufe des SFB stetig häufigeren Einsatz des Quantengravimeters QG-1 und ansteigender Leistungsfähigkeit sollen im Rahmen von Messreihen der Teilprojekte C01, A05 und C05 die praktische Anwendbarkeit der zugehörigen Methoden nachgewiesen und der Betrieb von QG-1 unter variierenden, rauen Bedingungen demonstriert werden.Leitung: Dr. Waldemar Herr, Prof. Dr.-Ing. Jürgen Müller, Prof. Dr. Ernst RaselTeam:Jahr: 2021Förderung: DFG
-
Atmosphäre-Ozean Hintergrundmodellierung für terrestrische Gravimetrie (SFB 1464, C06)Wir werden uns auf die Entwicklung von global anwendbarer Hintergrundmodelle der Atmosphären- und Ozeandynamik für weltweit verteilte terrestrische Schweremessungen konzentrieren. Die Hintergrundmodelle werden aufgeteilt in Deformationseffekte, welche auch die lateral heterogene Rheologie der Erdkruste berücksichtigen, regionale bis globale Anziehungseffekte der atmosphärischen und ozeanischen Massen und lokale Effekte atmosphärischer Massen aus der unmittelbaren Umgebung des Sensors, die am stärksten von der lokalen topographischen Rauigkeit abhängen und die potenziell am meisten von einer möglichen Kombination mit barometrischen Beobachtungen rund um das Gravimeter profitieren könnten.Leitung: Dr. Henryk Dobslaw, Dr.-Ing. Ludger TimmenTeam:Jahr: 2021Förderung: DFG
-
Grundwassergravimetrie und QG-1 (SFB 1464, C01)Für das Grundwassermanagement in Mitteleuropa bietet die bodengebundene Gravimetrie ein einzigartiges Potenzial zur lokalen Überwachung zeitlicher Schwankungen des Wassergehalts im Untergrund. Das Quantengravimeter (QG-1) der LUH, welches mit Hilfe von frei-fallenden Atomen die Schwerebeschleunigung bestimmt, befindet sich in der letzten Phase der Entwicklung (A01) und soll noch 2021 für geodätische und gravimetrische Anwendungen bereit sein. Die Fähigkeiten des Absolutgravimeters QG-1 werden sowohl mit Messungen in Gebäuden, als auch bei Messkampagnen im Gelände eingesetzt und getestet. Schwerefeldvariationen durch Grundwasserveränderungen sollen mit einem Fehler von 10 nm/s² bestimmt werden.Leitung: Dr.-Ing. Heiner Denker, Dr.-Ing. Ludger TimmenTeam:Jahr: 2021Förderung: DFG
-
Neue Messmethoden mit Laser Interferometern (SFB 1464, B01)Wir untersuchen eine neue Art von optischen Akzelerometern (ACC), entwickeln Laser Interferometer zur Abstandsmessung (Laser Ranging Interferometer, LRI) konzeptionell weiter um neue gravimetrische Satellitenkonstellationen zu ermöglichen und wir studieren die Winkelgeschwindigkeiten der Satelliten-Verbindungsachse, um daraus Erdschwerefeldinformationen zu gewinnen.Leitung: Prof. Dr.-Ing. Jürgen Müller, Dr. Vitali MüllerTeam:Jahr: 2021Förderung: DFGLaufzeit: 2021-2024
Terrestrische Gravimetrie
-
Fennoskandische LandhebungEin Test- und Anwendungsgebiet für GRACELeitung: Prof. Dr.-Ing. Jürgen Müller, Dr.-Ing. Ludger Timmen, Dr.-Ing. Heiner DenkerTeam:Jahr: 2003Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 15.3.2003 bis 28.2.2009
![]()
![]()
-
Einrichtung von absolutgravimetrischen Punkten auf der Zugspitze, auf dem Wank und und in Garmisch-PartenkirchenAlpenstationen zur Messung der Erdschwerebeschleunigung mit dem Absolutgravimeter FG5-220Leitung: Dr.-Ing. Ludger TimmenTeam:Jahr: 2003
![]()
![]()
-
Absolutschwerestationen in Kollafjordur auf den Färöer InselnAbsolutschweremessungen auf FäröerLeitung: Dr.-Ing. Ludger TimmenTeam:Jahr: 2003
![]()
![]()
-
Absolutschweremessungen in DänemarkLeitung: Dr.-Ing. Ludger TimmenTeam:Jahr: 2003
![]()
![]()
-
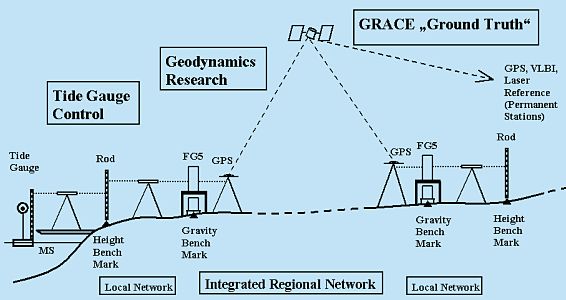
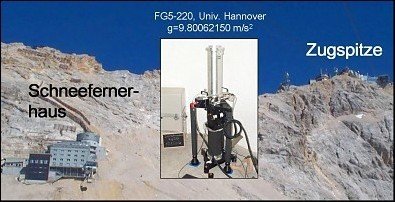
Gravimetrische Messungen auf der Zugspitze und am Wank (Bayerische Alpen)Die geodätische Überwachung von Veränderungen aufgrund des Alpenwachstums und dem Rückgang des Permafrostes erfolgt sowohl mit gravimetrischen als auch mit geometrischen Methoden. An der Zusammenarbeit sind neben dem IfE (Absolut- und Relativgravimetrie, Nivellement) auch die Bayerische Akademie der Wissenschaft (GNSS, Nivellement, Relativgrav., Wank), die TU München (Nivellement, Relativgravimetrie) und das GFZ Potsdam (Supraleitgravimetrie und permanente GNSS Station auf der Zugspitze) beteiligt.Leitung: Dr.-Ing. Ludger TimmenJahr: 2004Förderung: IFE, Germany’s Excellence Strategy – EXC-2123 “QuantumFrontiers”, GFZ Potsdam, TU München, Bayerische Akademie der WissenschaftenLaufzeit: 2004-2020
![]()
![]()
-
Verbesserte Kompensation des Vibrationsrauschens in Laserinterferometern mit Anwendungen in der AbsolutgravimetrieLeitung: Dr. Sergiy SvitlovJahr: 2011Förderung: DFGLaufzeit: 2011 - 2018
-
A mobile absolute gravimeter based on atom interferometry for highly accurate point observationsAtominterferometer zeigen eine hohe Empfindlichkeit gegenüber inertialen Kräften. Das an der Humboldt-Universität zu Berlin entwickelte Gravimetric Atom Interferometer (GAIN) ist ein mobiles Quantengravimeter, das durch die Interaktion lasergekühlter Rb-87 Atome mit Laserlicht in einer Fontäne die quasi-kontinuierliche Messung absoluter Schwere erlaubt. Im Rahmen der Weiterentwicklung werden Supraleitgravimeter und Laser-Interferometer Absolutgravimeter, die den derzeitigen Stand der Technik darstellen, in Vergleichsmessungen zur Charakterisierung von GAIN genutzt.Leitung: Prof. Dr.-Ing. Jürgen MüllerTeam:Jahr: 2012Förderung: DFG
![]()
![]() © IFE / M. Schilling
© IFE / M. Schilling
-
Rückführung des Absolutgravimeter FG5X-220 auf SI-EinheitenDas Micro-g LaCoste FG5 ist ein Frei-Fall Gravimeter, in dem ein Laserinterferometer in Mach-Zehnder Konfiguration einen entlang der Lotlinie fallenden Reflektor verfolgt. Aus der simultanen Zeit- und Distanzmessung wird der absolute Schwerewert berechnet. Diese Methode der Schweremessung ist unabhängig von externen Referenzen. Die notwendigen Gebrauchsstandards für die Messung, ein Rubidium Oszillator und ein He-Ne Laser, sind in dem Absolutgravimeter integriert, bedürfen aber regelmäßiger Kontrolle.Leitung: Dr.-Ing. Ludger TimmenTeam:Jahr: 2012
![]()
![]() © IfE / M. Schilling
© IfE / M. Schilling
-
SIMULTAN: Integriertes Geodätisches Überwachungskonzept für Erdfall-induzierte Oberflächendeformation und Massenumlagerung - AP 3.2 (absolute/relative Gravimetrie und Nivellement)Prozessorientierte Interpretation unter Nutzung geophysikalischer und geologischer Informationen und Entwicklung eines langfristigen Überwachungskonzeptes durch Anwendung eines iterativen, rückkoppelnden Optimierungsansatz.Leitung: Dr.-Ing. Ludger TimmenTeam:Jahr: 2015Förderung: BMBF - Bundesministerium für Bildung und Forschung
![]()
![]()
-
Establishing an Advanced Mexican Gravity Standardization BaseDieses gemeinsame Forschungsprojekt dient folgenden wissenschaftlichen Hauptzielen: a) Unterstützung der Realisierung eines hochmodernen nationalen Gravitationsstandards in Mexiko, der höchste Genauigkeitsanforderungen in der Messtechnik erfüllt, b) Unterstützung der Schaffung einer Basis für einen nationalen Bezugsrahmen für geowissenschaftliche Zwecke, c) Unterstützung der Verbesserung eines globalen Gravitationspotenzialfeldmodells für die Grundlagenforschung in der Geowissenschaft.Leitung: Dr.-Ing. Ludger TimmenTeam:Jahr: 2016Förderung: Physikalisch-Technische Bundesanstalt Braunschweig
![]()
![]()
-
Gravimetrisches Referenznetzwerk für ein 10m AtominterferometerDas Very Long Baseline Atom Interferometer (VLBAI) im Hannover Institute for Technology (HITec) ist ein physikalisches Experiment in dem Versuche zur Interferometrie von Atomen auf einer Fallstrecke von etwa 10m durchgeführt werden können. Diese Versuche dienen in erster Linie der Grundlagenphysik, es können aber auch gravimetrische Messungen durchgeführt werden. Aufgrund der großen Fallstrecke und dadurch lange andauernden Fallzeit wird von einer zukünftigen Genauigkeit im Bereich von 1 nm/s² ausgegangen. Bei klassischen transportablen Absolutgravimetern hingegen werden einige 10er nm/s² erreicht. Das VLBAI könnte somit eine Referenz für klassische Gravimeter darstellen. Für diese Versuche und zur Bewertung des Fehlerhaushaltes ist jedoch die Kenntnis des lokalen Schwerefeldes nötig. Dieses wird parallel zur Installation des Großgerätes und darüber hinaus durch gravimetrische Messungen und Vorwärtsmodellierung bestimmt.Leitung: Dr.-Ing. Manuel Schilling, Dr.-Ing. Ludger TimmenTeam:Jahr: 2017Förderung: IfE, SFB 1128, EXC-2123 "QuantumFrontiers"Laufzeit: 2017-2025
![]()
![]() © M. Schilling
© M. Schilling
-
Gravimetrische Gezeiten und Gravitationsströmungen in der NordseeDie Forschungsgruppe untersucht den Gravitations- und Deformationseffekt (Neigungseffekt), der durch zeitliche Variationen der Massenverteilung in der Atmosphäre und im Meer verursacht wird. Dabei ist zwischen den direkten Newtonschen Anziehungskräften und den indirekten Effekten durch die Krustendeformation (variierende Auflasten) zu unterscheiden. Letztere gehen aufgrund der Elastizität der festen Erdkruste mit einer vertikalen Verschiebung und einer Neigung des Meeresbodens sowie der Landoberfläche, insbesondere entlang der Küste oder der Inseln, einher. Eine solche vertikale Bodenverschiebung ist mit einer absoluten Höhenänderung des Gravimeters bezügl. des Geozentrums verbunden. Die kombinierte Beobachtung von Gravitations- und Neigungsänderungen ermöglicht die Trennung von Signalen aufgrund von Anziehung und Lastdeformation.Leitung: Dr.-Ing. Ludger Timmen, Dr. Adelheid WeiseTeam:Jahr: 2018Förderung: IfE, Germany’s Excellence Strategy – EXC-2123 “QuantumFrontiers”Laufzeit: 2018-2021
![]()
![]()
-
Optische Uhren für chronometrisches Nivellement (SFB 1464, A04)Wir werden das Potenzial des chronometrischen Nivellements demonstrieren, indem wir gemeinsam mit Teilprojekt A05 Höhenmessungen mit der gleichen oder sogar besseren Auflösung demonstrieren, als sie das geometrische Nivellement oder der Global Navigation Satellite System (GNSS)/Geoid-Ansatz derzeit erreichen können. Darüber hinaus wird die Methodik in Zusammenarbeit mit TerraQ-Teilprojekten eingesetzt, die gravimetrische und GNSS-Techniken nutzen, um z.B. Wasserspeichern zu überwachen. (Projekte: Terrestrische Uhrennetzwerke: Grundlagenphysik und Anwendungen (C02), Modellierung von Massenvariationen bis zu kleinen Skalen (C05), und Atmosphäre-Ozean Hintergrundmodellierung für terrestrische Gravimetrie (C06)).Leitung: PD Dr. Christian Lisdat, Prof. Dr. Piet O. Schmidt, Dr.-Ing. DenkerTeam:Jahr: 2021Förderung: DFG
-
Quantengravimetrie (SFB 1464, A01)Im Rahmen von TerraQ soll die auf der Atomchip-Technologie basierende Quantengravimetrie mit Bose-Einstein-Kondensaten (BECs) etabliert und ihr Potenzial für die mobile Gravimetrie erforscht werden. Mit dem in Laufe des SFB stetig häufigeren Einsatz des Quantengravimeters QG-1 und ansteigender Leistungsfähigkeit sollen im Rahmen von Messreihen der Teilprojekte C01, A05 und C05 die praktische Anwendbarkeit der zugehörigen Methoden nachgewiesen und der Betrieb von QG-1 unter variierenden, rauen Bedingungen demonstriert werden.Leitung: Dr. Waldemar Herr, Prof. Dr.-Ing. Jürgen Müller, Prof. Dr. Ernst RaselTeam:Jahr: 2021Förderung: DFG
-
Atmosphäre-Ozean Hintergrundmodellierung für terrestrische Gravimetrie (SFB 1464, C06)Wir werden uns auf die Entwicklung von global anwendbarer Hintergrundmodelle der Atmosphären- und Ozeandynamik für weltweit verteilte terrestrische Schweremessungen konzentrieren. Die Hintergrundmodelle werden aufgeteilt in Deformationseffekte, welche auch die lateral heterogene Rheologie der Erdkruste berücksichtigen, regionale bis globale Anziehungseffekte der atmosphärischen und ozeanischen Massen und lokale Effekte atmosphärischer Massen aus der unmittelbaren Umgebung des Sensors, die am stärksten von der lokalen topographischen Rauigkeit abhängen und die potenziell am meisten von einer möglichen Kombination mit barometrischen Beobachtungen rund um das Gravimeter profitieren könnten.Leitung: Dr. Henryk Dobslaw, Dr.-Ing. Ludger TimmenTeam:Jahr: 2021Förderung: DFG
-
Grundwassergravimetrie und QG-1 (SFB 1464, C01)Für das Grundwassermanagement in Mitteleuropa bietet die bodengebundene Gravimetrie ein einzigartiges Potenzial zur lokalen Überwachung zeitlicher Schwankungen des Wassergehalts im Untergrund. Das Quantengravimeter (QG-1) der LUH, welches mit Hilfe von frei-fallenden Atomen die Schwerebeschleunigung bestimmt, befindet sich in der letzten Phase der Entwicklung (A01) und soll noch 2021 für geodätische und gravimetrische Anwendungen bereit sein. Die Fähigkeiten des Absolutgravimeters QG-1 werden sowohl mit Messungen in Gebäuden, als auch bei Messkampagnen im Gelände eingesetzt und getestet. Schwerefeldvariationen durch Grundwasserveränderungen sollen mit einem Fehler von 10 nm/s² bestimmt werden.Leitung: Dr.-Ing. Heiner Denker, Dr.-Ing. Ludger TimmenTeam:Jahr: 2021Förderung: DFG


















Schwerefeld- und Geoidmodellierung
-
Kombination von CHAMP- und regionalen terrestrischen SchwerefelddatenEvaluierung und optimalen Kombination verschiedener Schwerefelddatensätze in Europa.Leitung: Dr.-Ing. Heiner Denker, Prof. Dr.-Ing. Günter SeeberTeam:Jahr: 2001Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 01.05.2001 – 30.04.2004
-
Fennoskandische LandhebungEin Test- und Anwendungsgebiet für GRACELeitung: Prof. Dr.-Ing. Jürgen Müller, Dr.-Ing. Ludger Timmen, Dr.-Ing. Heiner DenkerTeam:Jahr: 2003Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 15.3.2003 bis 28.2.2009
![]()
![]()
-
GOCE-GRavitationsfeldANalyse Deutschland – GOCE-GRAND II WP220 – Regionales Validierungs- und KombinationsexperimentIm Rahmen des Projekts wurden hochwertige validierte terrestrische Schwerefelddatensätze (insbesondere Lotabweichungen und Schweredaten) in Deutschland und Europa zur externen Validierung der GOCE-Produkte erstellt. Diese Daten dienten einerseits zur Validierung vorhandener Satellitenschwerefeldmodelle und andererseits zur Berechnung entsprechender kombinierter Quasigeoidlösungen für Deutschland und Europa.Leitung: Dr.-Ing. Heiner Denker (WP220 - IfE)Team:Jahr: 2005Förderung: Sonderprogramm GEOTECHNOLOGIEN, gefördert vom Bundesministerium für Bildung und Forschung (BMBF) und der Deutsche Forschungsgemeinschaft (DFG), Förderkennz. 03F0421DLaufzeit: 01.09.2005 – 31.08.2008
-
REaldatenAnaLyse GOCE (REAL GOCE)Teilprojekt GOCE Cal/Val, Quasigeoid und Höhensystem in DeutschlandLeitung: Dr.-Ing. Heiner Denker, Prof. Dr.-Ing. Jürgen Müller (IfE-Anteil WP310)Team:Jahr: 2009Förderung: Sonderprogramm GEOTECHNOLOGIEN, gefördert vom Bundesministerium für Bildung und Forschung (BMBF) und der Deutsche Forschungsgemeinschaft (DFG), Förderkennz. 03G0726CLaufzeit: 01.06.2009 – 31.05.2012
![]()
![]()
-
The recovery of Earth’s global gravity field from GOCE observationsThe ESA’s GOCE (Gravity field and steady-state Ocean Circulation Explorer) mission was the first to jointly apply SGG (satellite gravity gradiometry) and SST-hl (satellite-to-satellite high-low tracking) techniques to map the Earth’s gravity field. It delivered hundreds of millions of observations in four years’ lifetime, from 2009 to 2013. My Ph.D work is to recover a global gravity field model that is described by 62,997 spherical harmonic coefficients (up to degree/order 250) from the huge amount of GOCE observations.Leitung: Prof. Dr.-Ing. Jürgen MüllerTeam:Jahr: 2011Förderung: Stipendium
![]()
![]()
-
High-resolution modeling of geoid-quasigeoid separationLeitung: Prof. Dr.-Ing. Jakob FluryJahr: 2013
![]()
![]()
-
International Timescales with Optical Clocks (ITOC) /Researcher Excellence Grant (REG) „Gravity Potential for Optical Clock Comparisons“Leitung: Dr. Helen S. Margolis, Dr.-Ing. Heiner DenkerTeam:Jahr: 2013Förderung: European Metrology Research Programme (EMRP), jointly funded by the EMRP participating countries within EURAMET and the European UnionLaufzeit: 01.07.2013 – 31.03.2016
-
Schwerefeldmodellierung zur relativistischen Geodäsie und vertikalen Datumsfestlegung (CRC 1128, C04)Leitung: Dr.-Ing. Heiner DenkerTeam:Jahr: 2014Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 01.07.2014 – 31.06.2018
-
Evaluation of CAI gradiometer for the gravity field determinationThe successful GOCE (Gravity field and steady-state Ocean Circulation Explorer) mission has demonstrated that the satellite gravity gradiometry can significantly improve our knowledge on the Earth’s gravity field, especially in the medium- and short-wavelength parts. However, the electrostatic gradiometer on-board GOCE satellite is not technically perfect because of the widely-known 1/f noise in the low-frequency parts of measurements. Comparatively, the Cold Atom Interferometry (CAI) based gradiometer has flat noise down to the very-low frequency part, and shows a very long-term stability as well. In this project, our tasks are to rigorously map the CAI gradiometer’s noise to Earth’s gravity field coefficients through closed-loop simulations, where a similar mission scenario as GOCE will be taken to study a one-axis and a three-axis CAI gradiometer in the nadir Earth-pointing mode.Leitung: Prof. Dr.-Ing. Jürgen MüllerTeam:Jahr: 2016Förderung: European Space Agency (ESA)Laufzeit: 2016-2017
-
German Combined Geoid 2016 (GCG2016)Leitung: Dr.-Ing. Heiner DenkerTeam:Jahr: 2016
-
Gravity field recovery from satellite-to-satellite tracking dataDas Institut für Erdmessung berechnet und publiziert globale monatliche Schwerefelder aus Sensordaten der Multisatellitenmission GRACE. Zentrale Aspekte der Schwerefeldbestimmung und Forschungsgegenstand dieses Projektes sind die Sensorfusion, die Modellierung von konservativen und nicht-konservativen Störkräften, die numerische Integration der Satellitenbewegung, die Anpassung von modellierten Satellitenbahnen an Beobachtungen durch iterative Schätzverfahren, sowie die Parametrisierung der Satellitenbewegung.Leitung: Prof. Jakob FluryTeam:Jahr: 2018
![]()
![]() © IfE / I. Koch
© IfE / I. Koch
-
COST-G: International Combination Service for Time-variable Gravity Field SolutionsCOST-G ist ein zukünftiges Produktzentrum des IGFS (International Gravity Field Service), welches das Ziel hat kombinierte monatliche Schwerefelder bereitzustellen. Hierbei werden die von den einzelnen Analysezentren berechneten Normalgleichungsmatrizen der Schwerefeldparameter aufbauend auf eigens für den Service definierten Qualitätsmerkmalen empirisch gewichtet, gelöst und validiert.Leitung: Prof. Jakob FluryTeam:Jahr: 2019
![]()
![]()
-
Europäische GeoidberechnungenLeitung: Dr.-Ing. Heiner DenkerTeam:Jahr: 2019Förderung: verschiedene Landes- und Drittmittel; Unterstützung durch Internationale Assoziation für Geodäsie (IAG)Laufzeit: seit 1990
-
QuantumFrontiers (EXC2123) / Research Unit Relativistic GeodesyLeitung: Prof. Dr. Karsten Danzmann (AEI), Prof. Dr. Claus Lämmerzahl (ZARM)Team:Jahr: 2019Förderung: Deutsche Forschungsgemeinschaft (DFG)
-
Modellierung von Massenvariationen mit hoher räumlicher und zeitlicher Auflösung (SFB 1464, C05)Beobachtungen der zeitlichen Variationen des Erdschwerefeldes mittels Satellitengravimetrie, terrestrischer Gravimetrie und durch mit GNSS gemessenen Auflasteffekten erlauben einen Einblick in die regionalen Variationen und Veränderungen von Wasserspeichern auf jeweils unterschiedlichen räumlichen und zeitlichen Skalen. Das Ziel dieses Projekts ist die Entwicklung von Schwerefeldmodellen mit größtmöglicher räumlicher und zeitlicher Auflösung durch die konsistente Kombination der verschiedenen Beobachtungsverfahren. Diese gleichmäßige Einbeziehung der verschiedenen geodätischen Sensoren ist aufgrund der unterschiedlichen räumlichen und zeitlichen Sensitivität der Messsysteme eine der größten Herausforderung der Geodäsie.Leitung: Prof. Dr.-Ing. Annette Eicker, Prof. Dr. Andreas Günther, Dr. Matthias WeigeltTeam:Jahr: 2021Förderung: DFG
-
Quanten-basierte Beschleunigungsmessung auf Geodäsie-Satelliten (Q-BAGS)Kollaboration zwischen dem Observatoire de Paris Department Systèmes de référence temps-espace (SYRTE) und dem Institut für Erdmessung (IfE) der Leibniz Universität Hannover (LUH) eingebettet in die Forschungskooperation QUANTA zwischen Deutschland und FrankreichLeitung: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2021Förderung: BMWK / DLR e.V. (50WM2181)Laufzeit: 10/2021 - 09/2024








Relativistische Geodäsie
-
Clock network modeling (CRC 1128, C03)Leitung: Prof. Dr. Jürgen Müller, Prof. Dr. Claus LämmerzahlTeam:Jahr: 2014Förderung: DFG
-
Relativistische Geodäsie in Netzen optischer AtomuhrenLeitung: Prof. Dr.-Ing. Jakob FluryJahr: 2018Laufzeit: seit 2018
-
Transportable optische Uhren für relativistische Geodäsie (CRC 1128/2, A03)Leitung: Priv.-Doz. Dr. Christian Lisdat, Prof. Dr. Piet O. Schmidt, Dr.-Ing. Heiner DenkerTeam:Jahr: 2018Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 01.07.2018 – 30.06.2019
-
High-performance clock networks and their application in geodesyThe rapid development of optical clocks and frequency transfer techniques provides the opportunity to compare clocks’ frequencies at the uncertainty level of 10-18. This will enable relativistic geodesy with the aimed accuracy of cm in terms of height. Clock networks are thus highly relevant to various geodetic applications, such as the realization of a height reference system and the determination of regional/global gravity fields. In this project, we aim to investigate the potential of high-performance clock networks and quantify their contributions to specific applications through dedicated simulations.Leitung: Prof. Dr.-Ing. Jürgen MüllerTeam:Jahr: 2019Förderung: Germany’s Excellence Strategy – EXC-2123 “QuantumFrontiers” (DFG)
-
Chronometrisches NivellementLeitung: Dr.-Ing. Heiner DenkerTeam:Jahr: 2019Förderung: verschiedene Landes- und Drittmittel sowie separate ProjekteLaufzeit: seit 2010
-
Relativistische Untersuchungen mit LLR-DatenLeitung: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2019Förderung: Exzellenzstrategie des Bundes und der Länder – EXC-2123 QuantumFrontiers (DFG)Laufzeit: 2019 - 2025
-
Verfeinerte Modellierung des Erde-Mond-SystemsLeitung: Prof. Dr.-Ing. Jürgen MüllerTeam:Jahr: 2020Förderung: DLR-SILaufzeit: 2019 - 2022
-
Terrestrische Uhrennetzwerke: Grundlagenphysik und Anwendungen (SFB 1464, C02)Die stetige Verbesserung von optischen Uhren und deren Vergleich über lange Distanzen mittels Glasfaserkabel werden, besonders in TerraQ, hochgenaue terrestrische Uhrennetzwerke für Anwendungen in der Geodäsie möglich machen. Damit kann und wird sich das chronometrische Nivellement als neue geodätisch Messemethode etablieren. In diesem Projekt wird einerseits der allgemein-relativistische Formalismus für die uhrenbasierte Geodäsie in Strenge weiterentwickelt und auf Uhrennetzwerke angewendet, um die Vor- und Nachteile verschiedene Konstellationen und Messverfahren bewerten zu können. Darauf aufbauend werden die interessantesten Anwendungen von Uhrennetzwerken in der Geodäsie und der Grundlagenphysik identifiziert.Leitung: Prof. Dr.-Ing. Jürgen Müller, Prof. Dr. Claus LämmerzahlTeam:Jahr: 2021Förderung: DFG
-
Differentielles Lunar Laser RangingLeitung: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2021Förderung: Exzellenzstrategie des Bundes und der Länder – EXC-2123 QuantumFrontiers (DFG), DLR-SILaufzeit: 2021 - 2022
Satellitengravimetrie
-
GOCE-GRavitationsfeldANalyse Deutschland – GOCE-GRAND AP6 – Bestimmung äußerer Eichfaktoren und Validierung der ErgebnisseIm Rahmen des Projekts wurden Verfahren zur Kalibrierung und Validierung von GOCE-Resultaten mit externen Schwerefelddaten untersucht.Leitung: Prof. Dr.-Ing. Reiner RummelTeam:Jahr: 2002Förderung: Sonderprogramm GEOTECHNOLOGIEN, gefördert vom Bundesministerium für Bildung und Forschung (BMBF) und der Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 01.01.2002 – 31.12.2004
-
GOCE-GRAND II im BMBF-Geotechnologien-ProgrammEröffnung neuer Anwendungsfelder in der Geodäsie und in vielen Nachbardisziplinen durch verbesserte Schwerefeldbestimmung.Leitung: Prof. Dr.-Ing. Jürgen MüllerTeam:Jahr: 2009Förderung: Bundesministerium für Bildung und Forschung (BMBF) und Deutsche Forschungsgemeinschaft (DFG)
![]()
![]()
-
REaldatenAnaLyse GOCE (REAL GOCE)WP210 – Qualitätsbeurteilung gemessener GOCE-Gradienten (Q-GGG)Leitung: Dr.-Ing. Heiner Denker, Prof. Dr.-Ing. Jürgen MüllerTeam:Jahr: 2009Förderung: Sonderprogramm GEOTECHNOLOGIEN, gefördert vom Bundesministerium für Bildung und Forschung (BMBF) und der Deutsche Forschungsgemeinschaft (DFG), Förderkennz. 03G0726CLaufzeit: 01.06.2009 – 31.05.2012
![]()
![]()
-
Massenveränderungen in Sibirischen Permafrost abgeleitet aus GRACE und SatellitenbildernLeitung: Prof. Dr.-Ing. Jürgen MüllerTeam:Jahr: 2011
![]()
![]()
-
Zukunftskonzepte für SchwerefeldsatellitenmissionenLeitung: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2011Förderung: BMBF
![]()
![]()
-
Earth System Mass Transport Mission (e.motion)Leitung: Jakob FluryJahr: 2013
![]()
![]()
-
System studies for an optical gradiometer mission (CRC 1128, B07)Leitung: Dr. Gerhard Heinzel, Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2014Förderung: DFG
-
High performance satellite formation flight simulator (CRC 1128, B05)Leitung: Dr. Meike List (ZARM), Dr.-Ing. Benny Rievers (ZARM)Team:Jahr: 2014Förderung: DFG
-
Fusion of ranging, accelerometry, and attitude sensing in the multi-sensor system for laserinterferometric inter-satellite ranging (CRC 1128, B02)Die Qualität der Gravitationsfeld-Ergebnisse, die aus GRACE und GRACE Follow-On Inter-Satelliten-Messungen gewonnen werden, hängt nicht nur von der Messgenauigkeit ab. Ebenso wichtig ist die Qualität der Integration in das Multisensorsystem, bestehend aus K-Band Messungen, GNSS-Orbit-Tracking, Beschleunigungsmessung und Lageerkennung, sowie die Leistung dieses Systems als Ganzes. Die Systemleistung wird z.B. durch die Messungen der Sternkamera, durch die Charakteristika der Satellitenausrichtung, durch ungenaue Kenntnisse und Instabilitäten von Phasenzentren und Ausrichtungen der GNSS Antenne sowie durch Störeinflüsse der Beschleunigungsmessungen beeinflusst.Leitung: Prof. Jakob Flury, Dr. Gerhard HeinzelTeam:Jahr: 2014Förderung: DFGLaufzeit: 2014-2018
![]()
![]()
-
European Gravity Service for Improved Emergency Management (EGSIEM)Massenänderungen, abgeleitet aus der Mission GRACE (Gravity Recovery And Climate Experiment), liefern grundlegende Einblicke in den globalen Wasserkreislauf der Erde. Änderungen in der kontinentalen Wasser-speicherung steuern den regionalen Wasserhaushalt und können in Extremfällen zu Überschwemmungen und Dürren führen. Das Ziel von EGSIEM ist, den Wasserkreislauf der Erde aus dem Weltall mit hoher zeitlicher und räumlicher Auflösung zu beobachten und vorherzusagen.Leitung: Prof. Dr.-Ing. Jakob FluryTeam:Jahr: 2015Förderung: European Commission (EC)Laufzeit: 2015-2017
-
Data analysis challenge for the GRACE-FO community (CRC 1128, B04)Leitung: Dr.-Ing. Majid Naeimi, Dr. Martin Hewitson, Dr. Meike ListTeam:Jahr: 2015Förderung: DFG
-
3D Earth – A Dynamic Living PlanetThe goal of 3D-Earth is to establish a global 3D reference model of the crust and upper mantle based on the analysis of satellite gravity e.g. GOCE and (electro-)magnetic missions e.g. Swarm in combination with seismological models and analyse the feedback between processes in Earth’s deep mantle and the lithosphere. Selected case examples will provide the possibility to test these approaches on a global and regional scale. This will result in a framework for consistent models that will be used to link the crust and upper mantle to the dynamic mantle.Leitung: Prof. Dr.-Ing. Jakob FluryTeam:Jahr: 2017Förderung: ESALaufzeit: 2017-2019
-
Multi-sensor Climatology onboard GRACEThe thermosphere lies between the exosphere and the mesosphere. The temperature in this layer can reach up to 4,500 degrees Fahrenheit. The thickness of this layer is about 513 km [NASA, 2018]. The thermosphere is the top level of the Earth atmosphere, located from 100 to 1000 km altitude. At 100 km already, the air density is twelve orders of magnitude lower than at the Earth’s surface. However, the remaining air is enough to exert a significant force on satellites orbiting the Earth at low heights. This perturbation is mainly due to high orbital velocity of 7.5 km/s, and the proportional relation between the air drag and the square of the speed. Since the space-borne accelerometer could measure the total non-conservative accelerations acting on the satellites directly, the air drag component could be isolated with the help of solar and earth albedo radiation pressure models, then the atmospheric density can be estimated, which provides necessary data for making evaluation and improvement of the existing atmospheric models.Leitung: Prof. Dr.-Ing. Jakob Flury, Dr.-Ing. Akbar ShabanlouiJahr: 2018Laufzeit: WiSe 2018/2019
-
Hybridization of Classic and Quantum Accelerometers for Future Satellite Gravity MissionsUsing cold atom interferometry (CAI) accelerometers in the next generation of satellite gravimetry missions can provide long-term stability and precise measurements of the non-gravitational forces acting on the satellites. This allows for a reduction of systematic effects in current GRACE-FO gravity field solutions. In this project, we first aim to investigate the hybridization of quantum CAI-based and classical accelerometers for a GRACE-like mission and we discusse the performance improvement through dedicated simulations. Then we investigate different orbital configurations and mission concepts to find the optimal setting for future satellite gravimetry missions.Leitung: Prof. Dr.-Ing. MüllerTeam:Jahr: 2020
-
Neue Messmethoden mit Laser Interferometern (SFB 1464, B01)Wir untersuchen eine neue Art von optischen Akzelerometern (ACC), entwickeln Laser Interferometer zur Abstandsmessung (Laser Ranging Interferometer, LRI) konzeptionell weiter um neue gravimetrische Satellitenkonstellationen zu ermöglichen und wir studieren die Winkelgeschwindigkeiten der Satelliten-Verbindungsachse, um daraus Erdschwerefeldinformationen zu gewinnen.Leitung: Prof. Dr.-Ing. Jürgen Müller, Dr. Vitali MüllerTeam:Jahr: 2021Förderung: DFGLaufzeit: 2021-2024






Antennenkalibrierung
-
Kalibrierung stationsspezifischer Effekte in GPS ReferenzstationsnetzenDeterministisches Korrekturmodell für Mehrwegefehler an GNSS Referenzstationen im Land Niedersachsen.Leitung: Prof. Dr.-Ing. Günter SeeberTeam:Jahr: 2008Förderung: Landesamt für Geoinformation und Landentwicklung Niedersachsen (LGLN)
![]()
![]()
-
Kalibrierung der GPS Antenne für den Radarsatelliten TanDEM-X (DLR)Kalibrierung von LEO GNSS Antennen für präzise LEO-FormationenLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2008
-
Von der Komponentenkalibrierung zur Systemanalyse: konsistente Korrekturverfahren von Instrumentenfehlern für Multi-GNSSMehrwert durch Betrachtung des GesamtsystemsLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2009Förderung: BMWI und Deutsches Zentrum für Luft und Raumfahrt (DLR) - 50NA0903Laufzeit: 2009-2012
![]()
![]()
-
Verbesserte Positionierung und Navigation durch konsistente Multi-GNSS AntennenkorrekturenUntersuchung von Auswirkungen der Code Phasen Verzögerungen (GDV) auf die GNSS basierte Positionierung und Navigation sowie die Entwicklung eines Verfahrens zum adäquaten Vergleich von Kalibrierergebnissen.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2012Förderung: BMWI und Deutsches Zentrum für Luft und Raumfahrt (DLR) - 50NA1216Laufzeit: 2012 - 2014
![]()
![]()
-
GPS Codephasen-Variationen für GNSS-EmpfangsantennenNeben der sehr gut bekannten Existenz von Abweichungen des Empfangszentrums von GNSS-Antennen für Trägerphasen sind gleiche Effekte auch auf der Codephase (Code Phase Variations CPV) gefunden worden. Diese Abweichungen sind stark von der Beschaffenheit und Qualität der Empfangsantennen abhängig und nehmen gerade bei Massenmarktprodukten erhebliche Abweichungen an. Der Nachweis über die Charaktersitik der Codephasen-Variationen ist besonders für Navigationsanwendungen wichtig, da zum einen die Antennen notwendigen Spezifikationen entsprechen müssen und zum anderen die Präzision des Sensors durch Berücksichtigung dieser individuellen Kalibrierwerte deutlich verberssert werden können.Leitung: Dr.-Ing. Tobias KerstenTeam:Jahr: 2018
-
Trägerphasenvariationen (PCC) für neue GNSS-SignaleTrägerphasenvaritionen sind überaus notwendig für die präzise GNSS-Navigation und Positionierung. Derzeit werden nur GPS L1/L2 und GLONASS L1/L2 im Rahmen der operationellen roboterbasierten Kalibierung zur Verfügung gestellt. Die Weiterentwicklung der individuellen Satellitensysteme (GPS, GLONASS) und die Entwicklung von neuen Systemen (Galileo, Beidou) erfordern die Weiterentwicklung des Kalibrierverfahrens zur Bestimmung entsprechender Parameter neuer Systeme und Frequenzen. Ziel des Projektes ist die Bereitstellung und konsistente Verarbeitung von Kalibrierwerten für GPS L5 und Galileo E1/E5 Signalen auf Basis von Kugelfunktionsentwicklungen. Erhobene Phasenpattern werden mit Kalibrierwerten anderer Institutionen vergleichen und koordiniert ausgetauscht.Leitung: Dr.-Ing. Tobias KerstenTeam:Jahr: 2018
-
Gewinn eines grundlegenden Verständnisses der Mehrwege - Antennen - Empfänger - Interaktionen zur Standardisierung der Kalibrierung von Codephasenvariationen von GNSS-EmpfangsantennenEine der herausforderndsten offenen Forschungsfragen bei der Positionierung mit Globalen Satelliten Navigationssystems (GNSS) ist die genaue Charakterisierung der für die Messungen verwendeten Hardware. Während im Bereich der Trägerphase präzise Kalibrierungsstrategien entwickelt wurden, ist die Charakterisierung der Codephasenvariationen (CPV) aufgrund des höheren Rauschens und des stärkeren Mehrwegeeinflusses immer noch ungelöst, und es fehlt darüber hinaus ein ausreichendes Verständnis der Wechselwirkungen zwischen Antenne, Empfänger und Mehrwegeausbreitung, vor allem in der Geodäsie. Dieses Projekt kombiniert das Hintergrundwissen aus Geodäsie (IfE) und Elektrotechnik (DLR) und wird damit diese Wissenslücke schließen und grundlegende physikalische Einblicke in die Wechselwirkungen zwischen Antenne, Empfänger und Mehrwegeausbreitung liefern, um neuartige Methoden für eine konsistente CPV-Kalibrierung zu etablieren. Wir werden die Erkenntnisse verwenden, um die Verbesserungen durch Anbringen der neuen CPV zu analysieren, die bei Anwendungen in der Luftfahrt, bei der Zeitübertragung und bei PPP entstehen und allgemeine Empfehlungen für die Antenneninstallation ableiten.Leitung: Prof. Dr.-Ing. Steffen Schön, Dr.-Ing. Tobias KerstenTeam:Jahr: 2022Förderung: DFG, Projektnummer: 470510446
-
Accurate prediction of GNSS antenna performance in automotive scenarios - AccurautoFür die präzise Verortung mittels Satellitennavigationssystemen (GNSS), betreiben die deutschen Behörden GNSS-Korrekturdatendienste. Diese werden für die Fahrzeugverortung allerdings noch so gut wie nicht eingesetzt. Dies ist auf große, durch die Empfangsantennen auf Fahrzeugen verursachte Fehler zurückzuführen. Für niedrigpreisige Fahrzeugantennen sind Fehler bis zu einigen Metern gemessen und starke Abhängigkeiten von Fahrzeugtyp und Installationsort gezeigt worden. Das führt zu ungelösten Herausforderungen für die Kalibrierung von GNSS-Empfangsantennen für Fahrzeuge.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2024Förderung: Bundesministerium für Digitalisierung und Verkehr (BMDV), Förderkennnzeichen: 19F1189B




GNSS und Inertialnavigation
-
Modellierung distanzabhängiger systematischer EffekteEntwicklung eines Korrekturmodell für distanzabhängige Effekte in kleinen GPS Netzen sowie Abschätzung der Größe systematischer Resteffekte mit Methoden der IntervallmathematikLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2006
-
Abschätzung der Größe systematischer Resteffekte mit Methoden der IntervallmathematikErfassung und adäquate mathematische Beschreibung des Gesamtunsicherheitshaushaltes von GNSS Beobachtungen mit Verfahren der IntervallmathematikLeitung: Prof. Dr.-Ing. Steffen SchönJahr: 2006Förderung: Deutsche Forschungsgemeinschaft (DFG)
-
Kalibrierung der GPS Antenne für den Radarsatelliten TanDEM-X (DLR)Kalibrierung von LEO GNSS Antennen für präzise LEO-FormationenLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2008
-
Konzepte zur Qualitätsbeschreibung in aktiven GNSS-ReferenzstationsnetzenLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2009Förderung: Landesamt für Geoinformationen und Landentwicklung Niedersachsen (LGLN)
-
Qualitätssicherung für permanente GNSS-StationenQualitätsmanagement an permanenten GNSS Referenzstationen in Niedersachsen.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2010Förderung: Landesamt für Geoinformationen und Landentwicklung Niedersachsen (LGLN)
-
Bürgernahes FlugzeugVerbesserung der Qualität und Verminderung von Signalverlusten bei GNSS-gestützen gekurvten Landeanflügen im Rahmen der Entwicklung eines "Bürgernahen Flugzeugs"Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2011Förderung: Land Niedersachsen
![]()
![]()
-
Navigation und Positionierung in schwieriger UmgebungAnalyse von High-Sensitivity GNSS SensorenLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2011
![]()
![]()
-
Modellierung physikalischer Korrelationen von GNSS-Phasenbeobachtungen mit Ansätzen der TurbulenztheorieModellierung physikalischer Korrelation von GNSS Phasebeobachtungen mit Ansätzen der TurbulenztheorieLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2011Förderung: Das Projekt wird gefördert durch die Deutsche Forschungsgemeinschaft (SCHO 1314/1-1).
![]()
![]()
-
Modeling and correction of GNSS multipath effect through Software receiver and Ray tracingBeschreibung von Multipath durch Software-Empfänger und Raytracing.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2011Förderung: BMWI und Deutsches Zentrum für Luft und Raumfahrt (DLR)
-
Turbulenz Untersuchungen und verbesserte Modellierung der atmosphärischen Refraktion mit VLBI und GNSSVerbesserte Beschreibung von Refraktionsindexschwankungen, Bestimmung von Turbulenz-Parametern und verbesserte Modellierung der neutrosphärischen RefraktionLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2012Förderung: DFG (SCHO 1314/3-1)
-
VeNaDU: Verbesserte Positionierung und Navigation durch UhrmodellierungIn diesem Forschungsvorhaben sollen empfängerseitig die Vorteile moderner hochstabiler Atomuhren für die GNSS-basierte Positionierung und Navigation untersucht und innovative Konzepte zur Uhrmodellierung entwickelt werden.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2013Förderung: BMWi / DLRLaufzeit: 10/2013 - 11/2016
![]()
![]()
-
Kinematic GNSS positioning of Low Earth Orbiters (CRC 1128, B03)Ziel des Projektes ist die Verbesserung der Genauigkeit kinematischer Orbits von erdnahen Satelliten durch weiterentwickeltes Precise Point Positioning (PPP), welches um den Ansatz der Empfängeruhrmodellierung und das Konzept des Virtuellen Empfängers erweitert wird.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2014Förderung: DFG
![]()
![]()
-
High-Rate GNSS-Empfänger in der Flug-Navigation und -GravimetrieEntwicklung einer Methodik zur Datenvorverarbeitung und zur Geschwindigkeits- und Beschleunigungsschätzung aus Trägerphasenmessungen mit hoher Abtastrate (100Hz)Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2014Förderung: Bürgernahes Flugzeug Nachwuchsfond
![]()
![]()
-
Precise Point Positioning mit GPS-Einfrequenz-Empfängern und der Radom-Antenne in Raisting für das Autonome Fahren (PPP-AF)Teilprojekt: Bestimmung von Empfänger-BiasesLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2014Förderung: BMWi und DLRLaufzeit: 2014-2015
-
SIMULTAN: Integriertes Geodätisches Überwachungskonzept für Erdfall-induzierte Oberflächendeformation und Massenumlagerung - AP 3.1 (GNSS)Prozessorientierte Interpretation unter Nutzung geophysikalischer und geologischer Informationen und Entwicklung eines langfristigen Überwachungskonzeptes durch Anwendung eines iterativen, rückkoppelnden Optimierungsansatz.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2015Förderung: BMBF - Bundesministerium für Bildung und ForschungLaufzeit: 2015-2019
![]()
![]()
-
Improved GPS data analysis for the Swarm constellationNew concepts for GPS observation data quality assessment and positioning should be developed and evaluated taking advantage of variable geometries in the Swarm constellation.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2015Förderung: DFG
-
Alternative Integritätsmaße mittels Intervallmathematik (GRK 2159, Thema 1)Dieses Dissertationsvorhaben beschäftigt sich mit der Entwicklung von alternativen Integritätsmaßen auf Basis der Intervallmathematik, Fuzzy-Theorie und unscharfer Zufallsvariablen.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2016Förderung: DFG
![]()
![]()
-
Optimale kollaborative Positionierung (GRK 2159, Thema 4)Kollaboratives Positionierung (CP) ist eine vielversprechende Technik, die auf einer Gruppe von dynamischen Knoten (Fußgänger, Fahrzeuge usw.) basiert. Diese sind mit verschiedenen (zeitsynchronisierten) Sensoren ausgestattet. Die Qualität der Positionierungs-, Navigations- und Zeitbestimmungsinformationen (PNT) kann dabei durch die Durchführung von Messungen zwischen Knotenpunkten oder Elementen der Umgebung (Stadtmöbel, Gebäude usw.) erhöht werden.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2016Förderung: DFG
![]()
![]()
-
VeNaDU 2: Verbesserte Positionierung und Navigation durch UhrmodellierungDieses Folgeprojekt zum Vorhaben VeNaDU untersucht zum einen den Performance-Gewinn durch den Einsatz hochstabiler Atomuhren in kinematischem PPP. Zum anderen soll eine Hardware-technische Umsetzung einer miniaturisierten Atomuhr in einem Einfrequenz-Empfänger realisiert werden.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2017
![]()
![]()
-
Integrity Monitoring for Network RTK SystemsFrom the advent of the satellite positioning techniques, civil users have always been trying to find a way to have more accurate and precise coordinates of their position. Differential concepts, from early days of GPS, have been considered. Applying the RTCM format, made the transmission of corrections possible from reference stations to the users. At first stage the corrections were casted to the users from one single station, which is called single RTK (Real Time Kinematic). This method is limited in some ways; degrading by increasing distance from CORS (Continuously Operating Reference Station), needed same signals at reference and rover and remaining the reference station errors. For compensating these shortages, the Network RTK concept appeared. In NRTK the corrections are produced using a network (at least three) of reference stations. The concept of Precise Point Positioning (PPP) is currently associated with global networks. Precise orbit and clock solutions are used to enable absolute positioning of a single receiver. However, it is restricted in ambiguity resolution, in convergence time and in accuracy. Precise point positioning based on RTK networks (PPP-RTK) overcomes these limitations and gives centimeter-accuracy in a few seconds.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2018Förderung: Deutscher Akademischer Austauschdienst (DAAD)
-
Entwicklung und Test einer für Quantensensoren adäquaten Berechnungsstrategie für die InertialnavigationDurch neue Messprinzipien haben Quantensensoren signifikante Verbesserungen in Stabilität und Genauigkeit bei der Erfassung von inertialen Einflüssen erzielt. Anstelle mechanischer Federsysteme in Beschleunigungsmessern oder durch einen Faserkreisel oder Ringresonator umschlossene Flächen in Lasergyroskopen sind in Quantensensoren die Skalenfaktoren an atomare Übergänge gebunden und auf Frequenzmessungen zurückzuführen. Die alternativen Messverfahren und hohen Sensitivitäten der Quantensensoren erfordern eine adäquate Auswertestrategie, die sich von der klassischen Herangehensweise der Inertialnavigation unterscheidet. Ziel der Studie ist die Entwicklung und der Test einer entsprechenden Berechnungsstrategie, die gezielt die Anwendbarkeit der einzelnen Berechnungsschritte bei der Quanteninertialnavigation überprüft, und geeignete Alternativen, beispielsweise bei der Integrationsdynamik oder geschätzten Systemparametern, vorschlägt.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2018Förderung: DLR
![]()
![]()
-
Collaborative Navigation for Smart Cities (GRK 2159)Global Navigation Satellite Systems (GNSS) is the only navigation sensor that provides absolute positioning. However, urban areas form the most challenging environment for GNSS to achieve a reliable position. Because of the reduced satellite visibility and disturbed signal propagation like diffraction and multipath, the resulting position has a reduced accuracy and availability. The overall research objective of this project is to reduce these shortcomings through collaboration. Therefore, similarity of multipath at different locations within streets will be studied.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2019Förderung: Deutsche Forschungsgemeinschaft (DFG) - Graduiertenkolleg GRK 2159
-
QGyro: Quantum Optics Inertial Sensor ResearchIn diesem Vorhaben sollen hochgenaue Quanteninertialsensoren zur Stützung konventioneller Inertialnavigationssensoren entwickelt und getestet werden, die dann in verschiedenen weiteren Entwicklungsstufen bis zu 6 Messfreiheitsgraden ausgebaut und für eine autonome Navigation eingesetzt werden können.Leitung: Prof. Dr.-Ing. SchönTeam:Jahr: 2019Förderung: Bundesministerium für Wirtschaft und Klimaschutz (BMWK / DLR), Förderkennzeichen: 50RK1957Laufzeit: 2019 - 2022
![]()
![]()
-
FIRST: Fingerprinting, Integrity Monitoring and Receiver Signal Processing Using Miniature Atomic Clock TechnologyUm die Performance der Bestimmung von Position, Geschwindigkeit und Zeit mittels GNSS-Messungen zu verbessern, werden heute häufig Chip Scale Atomic Clocks (CSACs) genutzt, welche dem GNSS-Empfänger ein hochstabiles Frequenzsignal zur Verfügung stellen. Die Verbesserung der Navigationslösung erfolgt bisher allerdings ausschließlich algorithmisch. In diesem Vorhaben soll nun der Einfluss von der Empfängeruhr auf die Qualität der Signalverarbeitung in einem Software-Empfänger untersucht werden, indem die internen Verarbeitungsschritte an die hohe Frequenzstabilität des CSAC-Signals angepasst werden. Zusätzlich soll die Machbarkeit des Fingerprintings mit hochstabilen Atomuhren unter verschiedenen dynamischen Bedingungen untersucht und zusätzlich Integritätsmaße für den GNSS-basierten Zeittransfer entwickelt werden.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2020Förderung: Bundesministerium für Wirtschaft und Energie (BMWi), Förderkennzeichen: 50NA2101
![]()
![]()
-
Korrektur von GNSS-Mehrwegeeffekten für die zuverlässige Eigenlokalisierung von hochautomatisierten Fahrzeugen in innerstädtischen Bereichen (KOMET)Die im Fahrzeugbereich verwendete Code-Range (Codemessung) liefert aufgrund ihres hohen Messrauschens nicht die notwendige Auflösung der Ortung. Aufgrund der komplexen GNSS-Signalausbreitung (Signalabschattung, Mehrwegeeffekte) in urbanen Umgebungen ist die Bestimmung einer genauen und robusten Positionslösung eine besondere Herausforderung - z.B. bei der Ortung in engen Straßenschluchten. Das geplante Forschungsvorhaben fokussiert sich daher auf die Entwicklung und Anwendung innovativer Korrekturverfahren zur Reduktion auftretender Mehrwegeeffekte, um die trägerphasenbasierte GNSS-Ortung zu verbessern.Leitung: Prof. Dr.-Ing. Steffen Schön, Dr.-Ing. Tobias KerstenTeam:Jahr: 2020Förderung: BMWi / TÜV Rheinland Consulting GmbH
![]()
![]() © Ch. Skupin (Bosch)
© Ch. Skupin (Bosch)
-
Bounding and propagating observation uncertainty with interval mathematic (GRK 2159)Intervals (Jaulin et al 2001) can be seen as a natural way to bound observation uncertainty in navigation systems such as GPS, IMU or optical sensors like LIDAR, since they are in principle free of any assumption about probability distributions and can thus describe adequately remaining systematic effects (Schön 2016, Schön and Kutterer 2006). In this project, we intent to experimentally investigate in more details the actual size of observation intervals.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2020Förderung: Deutsche Forschungsgemeinschaft (DFG) - Graduiertenkolleg GRK 2159
-
Interferometrische Glasfaserverbindungen (SFB 1464, A05)Um das chronometrische Nivellement als Routinewerkzeug für die Geodäsie zu etablieren, sind Forschung und Entwicklungen für hochpräzise Frequenzübertragung in den Bereichen Interferometrische Glasfaserverbindungen (Interferometric Fibre Links, IFLs) und Globales Navigationssatellitensystem - Frequenztransfer (GNSS-FT) erforderlich. Die Entwicklung von feldtauglichen IFLs-Geräten, ultrapräziser GNSS-FT und deren Einsatz für chronometrische Nivellements sind neue Forschungs- und Entwicklungsgebiete, die viele Anwendungen von geodätischem Interesse eröffnen werden. Unser Ziel ist es, eine chronometrische Nivellement-Kampagne zwischen Insel und Festland unter Verwendung von IFL und GNSS-FT sowie der in Teilprojekt A04 entwickelten transportablen optischen Uhr zu realisieren.Leitung: Prof. Dr.-Ing. Steffen Schön, Dr. Jochen KronjägerTeam:Jahr: 2021
-
5GAPS: 5G Access to Public SpacesIn diesem Forschungsvorhaben werden die Positionierungsmöglichkeiten des neusten Mobilfunkstandards 5G NR untersucht. Durch den steigenden Kommunikationsbedarf und die flächendeckende Installation von 5G NR Netzen, können terrestrische Signalquellen eine Alternative oder Ergänzung zu GNSS Signalen bieten, wenn GNSS Signale nicht verfügbar oder durch die Umgebung eingeschränkt sind.Leitung: Prof. Dr.-Ing Steffen SchönTeam:Jahr: 2022Förderung: Bundesministerium für Digitales und Verkehr (BMDV), Förderkennzeichen: 45FG121_F
-
Entwicklung einer kompakten Experimentalplattform eines gyro-stabilisierten Quantennavigationssensors (QGyroPlus)Ziel des Projekts ist die Entwicklung eines einzigartigen Sechs-Achsen-Quanteninertialnavigationssensors, der erstmalig driftfreie und hochpräzise Navigation ermöglicht. Diese bahnbrechende Technologie wird als kompakte Experimentalplattform im Projektverlauf getestet und könnte die Tür zu völlig neuen Anwendungsbereichen in der autonomen Navigation öffnen.Leitung: Prof. Dr. Steffen SchönTeam:Jahr: 2023Förderung: Bundesministerium für Wirtschaft und Klimaschutz (BMWK / DLR), Förderkennzeichen: 50NA2106
![]()
![]()
-
Entwicklung eines DAB-Empfangsmoduls zur GNSS-KorrekturdatenübermittlungIn diesem Projekt wird ein DAB-zu-GNSS-Empfangsmodul entwickelt, welches GNSS-Korrekturen über DAB-Technologie empfangen und verarbeiten kann. Es wird im Vergleich zur Mobilfunkübertragung getestet. Die Evaluierung umfasst die quantitative und qualitative Untersuchung des Datenstroms und praktische Tests des Moduls in GNSS-Anwendungsszenarien. Das Projekt erfolgt in Kooperation mit der RFmondial GmbH.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2023Förderung: Zuwendung aus Mitteln des Europäischen Fonds für Regionale Entwicklung (EFRE) und des Landes Niedersachsen im Förderprogramm "Innovationsförderprogramm für Forschung und Entwicklung"
-
Navigation mit Quantensensorik im Weltraum (SpaceQNav)Das Projekt widmet sich der Erforschung innovativer Quanten-Inertialsensorik zur Verbesserung der Weltraumnavigation. Ziel ist es, die Navigationsleistung erheblich zu steigern, indem die Präzision und Langzeitstabilität für Missionen von der Erdumlaufbahn bis zur Mondoberfläche revolutioniert wird. Durch die Analyse von Designanforderungen und Auswertestrategien soll das volle Potenzial dieser Technologie ausgeschöpft werden.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2023Förderung: Bundesministerium für Wirtschaft und Klimaschutz (BMWK/DLR), Förderkennzeichen: 50NA2310A
-
Modellierung von Quantensensoren in einem realistischen Navigationskontext – SimulaQrUmPositionierung, Navigation und Timing sind entscheidend für moderne Systeme im Transportwesen, der Landwirtschaft und der Raumfahrt, jedoch stoßen herkömmliche GNSS-Signale oft an ihre Grenzen, etwa in Städten oder unter Wasser. Dieses Projekt entwickelt gemeinsam mit Partnern wie dem Institut für Quantenoptik (IQO) und Airbus Defence and Space ein neues Simulationswerkzeug, um Navigationslösungen durch die Kombination von Quantensensoren und Trägheitssensoren zuverlässiger und stabiler zu machen.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2024Förderung: European Space Agency (ESA), Förderkennzeichen: NAVISP-EL1-089
![]()
![]() © IQO
© IQO
-
Accurate prediction of GNSS antenna performance in automotive scenarios - AccurautoFür die präzise Verortung mittels Satellitennavigationssystemen (GNSS), betreiben die deutschen Behörden GNSS-Korrekturdatendienste. Diese werden für die Fahrzeugverortung allerdings noch so gut wie nicht eingesetzt. Dies ist auf große, durch die Empfangsantennen auf Fahrzeugen verursachte Fehler zurückzuführen. Für niedrigpreisige Fahrzeugantennen sind Fehler bis zu einigen Metern gemessen und starke Abhängigkeiten von Fahrzeugtyp und Installationsort gezeigt worden. Das führt zu ungelösten Herausforderungen für die Kalibrierung von GNSS-Empfangsantennen für Fahrzeuge.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2024Förderung: Bundesministerium für Digitalisierung und Verkehr (BMDV), Förderkennnzeichen: 19F1189B
-
Deformation Analysis Based on Terrestrial Laser Scanner Measurements (TLS-Defo, FOR 5455, Project 5)Our research aims to enhance the Terrestrial Laser Scanning (TLS) uncertainty budget by developing strategies for deterministic observation intervals and transforming error bands into point uncertainties. We are also introducing distribution-free surface uncertainty measures to improve the precision and reliability of TLS data.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2024Förderung: Deutsche Forschungsgemeinschaft (DFG) - Forschergruppe (FOR) 5455

























Lunar Laser Ranging (LLR)
-
Lunar Laser Ranging: Konsistente Modellierung für geodätische und wissenschaftliche AnwendungenLeitung: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2006Förderung: DFG
![]()
![]()
-
Verfeinerte Modellierung des Erde-Mond-Systems im mm-Bereich zur Bestimmung relativistischer GrößenLeitung: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2009Förderung: QUEST
![]()
![]()
-
Baryzentrische EphemeridenBaryzentrische EphemeridenLeitung: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2012Förderung: DFG FOR1503 Reference Systems
![]()
![]()
-
Mondbezogene ReferenzsystemeLeitung: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2014Förderung: DFG - FOR 1503Laufzeit: 2014-2019
![]()
![]()
-
Beitrag von LLR zu Referenzsystemen und ErdorientierungsparameternLeitung: Prof. Dr.-Ing. Jürgen MüllerTeam:Jahr: 2019Förderung: Exzellenzstrategie des Bundes und der Länder – EXC-2123 QuantumFrontiers (DFG), DLR-SILaufzeit: 2019 - 2025
-
Relativistische Untersuchungen mit LLR-DatenLeitung: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2019Förderung: Exzellenzstrategie des Bundes und der Länder – EXC-2123 QuantumFrontiers (DFG)Laufzeit: 2019 - 2025
-
Verfeinerte Modellierung des Erde-Mond-SystemsLeitung: Prof. Dr.-Ing. Jürgen MüllerTeam:Jahr: 2020Förderung: DLR-SILaufzeit: 2019 - 2022
-
Differentielles Lunar Laser RangingLeitung: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2021Förderung: Exzellenzstrategie des Bundes und der Länder – EXC-2123 QuantumFrontiers (DFG), DLR-SILaufzeit: 2021 - 2022

Weltraumsensorik
-
In-Orbit System Analysis of the Gravity Recovery and Climate Experiment (GRACE) MissionDie genaue Bestimmung und Kontrolle der Satellitenlage spielt eine Schlüsselrolle für die Satellitengeodäsie im Allgemeinen und für die Satelliten-zu-Satelliten-Verfolgung im Besonderen. Das Projekt lieferte die erste detaillierte Charakterisierung von GRACE-Lage-Fehlern und -Variationen. Die Untersuchungen betrafen die Variationen des Sichtwinkels zwischen den Sternkameras, die gewichtete Kamerakopfkombination sowie die Fehlerausbreitung zu Inter-Satelliten-Entfernungs- und Beschleunigungsmessungen. Die Ergebnisse führten zu signifikanten Verbesserungen in der operativen GRACE-Datenverarbeitung.Leitung: Prof. Jakob FluryTeam:Jahr: 2009Förderung: Exzellenzcluster QUESTLaufzeit: 2009-2015
![]()
![]() © IfE / Bandikova
© IfE / Bandikova
-
Highly physical penumbra solar radiation pressure modeling with atmospheric effectsDuring penumbra transitions of an Earth orbiter, the solar radiation hitting the satellite is strongly influenced by refraction and absorption of light rays grazing the Earth’s atmosphere. The project implemented solar radiation pressure modeling including these effects. Model results were tested by comparing with measurements of the accelerometers of the GRACE low Earth orbiters.Leitung: Prof. Jakob Flury, Tamara BandikovaTeam:Jahr: 2010Förderung: RISE/QUESTLaufzeit: 2010
![]()
![]()
-
Disentangling gravitational signals and errors in global gravity field parameter estimation from satellite observations (SFB 1128, C01)Entfernungsraten-Residuen aus der Schätzung der globalen Schwerefeldparameter aus der GRACE-Satelliten-zu-Satelliten-Messung (SST) zeigen eine Reihe von systematischen Effekten, die die Genauigkeit der geschätzten Parameter einschränken. Das Projekt untersuchte die Eigenschaften von Zeitreihen von Range-Rate Residuen. Es wurde untersucht, wie sich ein Abfall des K-Band-Messung Signal-Rausch-Verhältnisses bei bestimmten Dopplerfrequenzen zwischen den Satelliten auf die Residuen auswirkt sowie Anomalien bei Penumbra-Durchgängen. Im Rahmen des Projekts an der TU Graz wurden in der Gruppe von Prof. Mayer-Gürr Möglichkeiten untersucht, Wavelet-Parameter in der SST-Schwerefeldparameterschätzung zu verwenden.Leitung: Prof. Jakob FluryTeam:Jahr: 2014Förderung: DFGLaufzeit: 2014-2018
-
Swarm ESL/DISC: Support to accelerometer data analysis and processingLeitung: Prof. Dr.-Ing. Jakob FluryTeam:Jahr: 2016Förderung: ESA (DTU Space)Laufzeit: 2016-2020
-
Interactions of Low-orbiting Satellites with the Surrounding Ionosphere and Thermosphere Part II (INSIGHT II)In unserem Institut stellen wir reduzierte und kalibrierte Schwarm-Beschleunigungssensoren für die ESA Swarm-Datenverarbeitungskette zur Verfügung, die die Grundlage für die Bestimmung der thermosphärischen Dichte bilden. Dazu gehört auch die Kalibrierung des Beschleunigungssensors durch präzise Bahnbestimmung von Schwarm-Satelliten.Leitung: Prof. Dr.-Ing. Jakob FluryTeam:Jahr: 2018Förderung: DFGLaufzeit: 2018-2021
-
Multi-sensor Climatology onboard GRACEThe thermosphere lies between the exosphere and the mesosphere. The temperature in this layer can reach up to 4,500 degrees Fahrenheit. The thickness of this layer is about 513 km [NASA, 2018]. The thermosphere is the top level of the Earth atmosphere, located from 100 to 1000 km altitude. At 100 km already, the air density is twelve orders of magnitude lower than at the Earth’s surface. However, the remaining air is enough to exert a significant force on satellites orbiting the Earth at low heights. This perturbation is mainly due to high orbital velocity of 7.5 km/s, and the proportional relation between the air drag and the square of the speed. Since the space-borne accelerometer could measure the total non-conservative accelerations acting on the satellites directly, the air drag component could be isolated with the help of solar and earth albedo radiation pressure models, then the atmospheric density can be estimated, which provides necessary data for making evaluation and improvement of the existing atmospheric models.Leitung: Prof. Dr.-Ing. Jakob Flury, Dr.-Ing. Akbar ShabanlouiJahr: 2018Laufzeit: WiSe 2018/2019
-
Modellierung mit Quantensensoren gestützter SatellitenmissionenDieses Projekt beschreibt den den Einsatz von Beschleunigungsmessern auf Grundlage von Atominterferometern in Schwerefeldsatellitenmissionen. Es wird sowohl der Ersatz klassischer elektrostatischer Beschleunigungsmesser durch Quantensensoren als auch die Kombination beider Sensorarten in einem Hybridsystem untersucht.Leitung: Prof. Dr.-Ing. Jürgen MüllerTeam:Jahr: 2019Förderung: DLR
![]()
![]() © Schilling
© Schilling





Geodätische Astronomie
-
Entwicklung und Erprobung einer hochgenauen, echtzeitfähigen, transportablen digitalen Zenitkamera für die LotrichtungsbestimmungLeitung: Prof. Dr.-Ing. Günter SeeberTeam:Jahr: 2004Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 2001-2004
![]()
![]()
-
Nutzung eines operationellen transportablen hochpräzisen digitalen Zenitkamerasystems für die hochauflösende Bestimmung und Validierung von physikalischen HöhenbezugsflächenHochauflösende Bestimmung und Validierung von physikalischen Höhenbezugsflächen.Leitung: Prof. Dr.-Ing. Günter SeeberTeam:Jahr: 2011Förderung: Deutsche Forschungsgemeinschaft (DFG)
![]()
![]()
SFB 1128 (geo-Q)
-
Modeling of mass variations down to small scales (CRC 1128, C05)Leitung: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2014Förderung: DFG
![]()
![]()
-
Clock network modeling (CRC 1128, C03)Leitung: Prof. Dr. Jürgen Müller, Prof. Dr. Claus LämmerzahlTeam:Jahr: 2014Förderung: DFG
-
Kinematic GNSS positioning of Low Earth Orbiters (CRC 1128, B03)Ziel des Projektes ist die Verbesserung der Genauigkeit kinematischer Orbits von erdnahen Satelliten durch weiterentwickeltes Precise Point Positioning (PPP), welches um den Ansatz der Empfängeruhrmodellierung und das Konzept des Virtuellen Empfängers erweitert wird.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2014Förderung: DFG
![]()
![]()
-
Relativistische Effekte in Satelliten-Konstellationen (CRC 1128, C02)Leitung: Dr.-Ing. habil. Enrico Mai, Prof. Dr. Claus Lämmerzahl (ZARM), Dr. Eva Hackmann (ZARM)Team:Jahr: 2014Förderung: DFG
-
Disentangling gravitational signals and errors in global gravity field parameter estimation from satellite observations (SFB 1128, C01)Entfernungsraten-Residuen aus der Schätzung der globalen Schwerefeldparameter aus der GRACE-Satelliten-zu-Satelliten-Messung (SST) zeigen eine Reihe von systematischen Effekten, die die Genauigkeit der geschätzten Parameter einschränken. Das Projekt untersuchte die Eigenschaften von Zeitreihen von Range-Rate Residuen. Es wurde untersucht, wie sich ein Abfall des K-Band-Messung Signal-Rausch-Verhältnisses bei bestimmten Dopplerfrequenzen zwischen den Satelliten auf die Residuen auswirkt sowie Anomalien bei Penumbra-Durchgängen. Im Rahmen des Projekts an der TU Graz wurden in der Gruppe von Prof. Mayer-Gürr Möglichkeiten untersucht, Wavelet-Parameter in der SST-Schwerefeldparameterschätzung zu verwenden.Leitung: Prof. Jakob FluryTeam:Jahr: 2014Förderung: DFGLaufzeit: 2014-2018
-
Schwerefeldmodellierung zur relativistischen Geodäsie und vertikalen Datumsfestlegung (CRC 1128, C04)Leitung: Dr.-Ing. Heiner DenkerTeam:Jahr: 2014Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 01.07.2014 – 31.06.2018
-
Transportable quantum gravimeter (CRC 1128, A01)Leitung: Prof. Dr. Jürgen Müller, Prof. Dr. Ernst M. RaselTeam:Jahr: 2014Förderung: DFG
-
System studies for an optical gradiometer mission (CRC 1128, B07)Leitung: Dr. Gerhard Heinzel, Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2014Förderung: DFG
-
High performance satellite formation flight simulator (CRC 1128, B05)Leitung: Dr. Meike List (ZARM), Dr.-Ing. Benny Rievers (ZARM)Team:Jahr: 2014Förderung: DFG
-
Fusion of ranging, accelerometry, and attitude sensing in the multi-sensor system for laserinterferometric inter-satellite ranging (CRC 1128, B02)Die Qualität der Gravitationsfeld-Ergebnisse, die aus GRACE und GRACE Follow-On Inter-Satelliten-Messungen gewonnen werden, hängt nicht nur von der Messgenauigkeit ab. Ebenso wichtig ist die Qualität der Integration in das Multisensorsystem, bestehend aus K-Band Messungen, GNSS-Orbit-Tracking, Beschleunigungsmessung und Lageerkennung, sowie die Leistung dieses Systems als Ganzes. Die Systemleistung wird z.B. durch die Messungen der Sternkamera, durch die Charakteristika der Satellitenausrichtung, durch ungenaue Kenntnisse und Instabilitäten von Phasenzentren und Ausrichtungen der GNSS Antenne sowie durch Störeinflüsse der Beschleunigungsmessungen beeinflusst.Leitung: Prof. Jakob Flury, Dr. Gerhard HeinzelTeam:Jahr: 2014Förderung: DFGLaufzeit: 2014-2018
![]()
![]()
-
Data analysis challenge for the GRACE-FO community (CRC 1128, B04)Leitung: Dr.-Ing. Majid Naeimi, Dr. Martin Hewitson, Dr. Meike ListTeam:Jahr: 2015Förderung: DFG
-
Transportable optische Uhren für relativistische Geodäsie (CRC 1128/2, A03)Leitung: Priv.-Doz. Dr. Christian Lisdat, Prof. Dr. Piet O. Schmidt, Dr.-Ing. Heiner DenkerTeam:Jahr: 2018Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 01.07.2018 – 30.06.2019


QUEST
-
Verfeinerte Modellierung des Erde-Mond-Systems im mm-Bereich zur Bestimmung relativistischer GrößenLeitung: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2009Förderung: QUEST
![]()
![]()
-
In-Orbit System Analysis of the Gravity Recovery and Climate Experiment (GRACE) MissionDie genaue Bestimmung und Kontrolle der Satellitenlage spielt eine Schlüsselrolle für die Satellitengeodäsie im Allgemeinen und für die Satelliten-zu-Satelliten-Verfolgung im Besonderen. Das Projekt lieferte die erste detaillierte Charakterisierung von GRACE-Lage-Fehlern und -Variationen. Die Untersuchungen betrafen die Variationen des Sichtwinkels zwischen den Sternkameras, die gewichtete Kamerakopfkombination sowie die Fehlerausbreitung zu Inter-Satelliten-Entfernungs- und Beschleunigungsmessungen. Die Ergebnisse führten zu signifikanten Verbesserungen in der operativen GRACE-Datenverarbeitung.Leitung: Prof. Jakob FluryTeam:Jahr: 2009Förderung: Exzellenzcluster QUESTLaufzeit: 2009-2015
![]()
![]() © IfE / Bandikova
© IfE / Bandikova
-
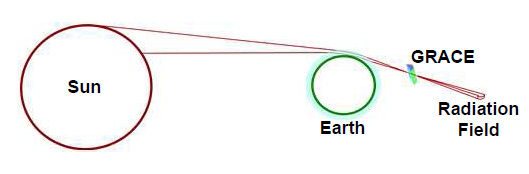
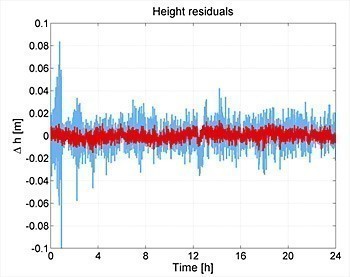
Highly physical penumbra solar radiation pressure modeling with atmospheric effectsDuring penumbra transitions of an Earth orbiter, the solar radiation hitting the satellite is strongly influenced by refraction and absorption of light rays grazing the Earth’s atmosphere. The project implemented solar radiation pressure modeling including these effects. Model results were tested by comparing with measurements of the accelerometers of the GRACE low Earth orbiters.Leitung: Prof. Jakob Flury, Tamara BandikovaTeam:Jahr: 2010Förderung: RISE/QUESTLaufzeit: 2010
![]()
![]()
-
Analyse des Einflusses hochgenauer externer Uhren auf die GNSS-AuswertungAnwendung hochgenauer Oszillatoren in der Satellitennavigation.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2011Förderung: QUEST
![]()
![]()
-
Schwerefeldbestimmung aus hochpräziser ZeitmessungSchwerefeldbestimmung aus hochpräziser ZeitmessungLeitung: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Jahr: 2011Förderung: QUEST (Quantum Engineering and Space Time Research)
![]()
![]()


Projektseminare
-
Hochpräzise Bestimmung von physikalischen Höhenbezugsflächen mit Zenitkamera, GPS und Gravimetrie für die Justierung von linearen TeilchenbeschleunigernDas deutsche Elektronensynchrotron DESY plant derzeit in internationaler Zusammenarbeit den 33 km langen Linearbeschleuniger TESLA und den Röntgenlaser XFEL. Der Betrieb von Beschleunigungsanlagen dieser Länge erfordert eine sehr hohe Aufstellungsgenauigkeit der strahlführenden Komponenten. In jedem Teilabschnitt von 600 m Länge (= Betatronwellenlänge) muss die Justierung mit einer Nachbarschaftsgenauigkeit von 0.5 mm in der Lage und 0.2 mm in der Höhe gewährleistet sein.Leitung: Dipl.-Ing. Hirt, Dipl.-Ing. Jarecki, Dipl.-Ing. WolfJahr: 2002Laufzeit: WiSe 2002 - SoSe 2003
-
Präzise Höhenbestimmung mit GPSIn vielen Anwendungsbereichen des Vermessungswesens hat sich das Navigationssystem GPS als genaues, zuverlässiges und wirtschaftliches Verfahren zur Positionsbestimmung durchgesetzt. Überwiegend werden jedoch nur die Lagekomponenten und nicht die um den Faktor 2 bis 3 ungenauere Höhenkomponente genutzt, obwohl heute auch hierfür Genauigkeiten von unter 1 cm erreichbar sind. Gerade unter wirtschaftlichen Gesichtspunkten und aufgrund der fortschreitenden Entwicklung immer genauerer Geoidmodelle stellt sich die Frage, inwieweit GPS schon heute das zeitaufwendige geometrische Nivellement ablösen oder ergänzen kann.Leitung: Dipl.-Ing. Olaf Bielenberg, Dr.-Ing. Florian DilssnerJahr: 2003Laufzeit: WiSe 2003 - SoSe 2004
-
Berechnung von Gravitationsgradienten zur Kalibrierung und Validierung von GOCE-GradiometerdatenIm Jahr 2006 wird die Satellitenmission GOCE (Gravity Field and Steady-State Ocean Circulation Explorer) zur Bestimmung des Erdschwerefeldes gestartet werden. Dabei wird der langwellige Anteil des Erdschwerefeldes durch Beobachtung der Satellitenbahn mit GPS (Satellite-to-Satellite-Tracking) bestimmt. Der kurzwellige Anteil wird erstmalig mit einem Gradiometer beobachtet, das mit Beschleunigungssensoren die zweiten Ableitungen des Gravitationspotentials ( = Beschleunigungsdifferenzen über kurze Basislinien), die soge-nannten Gradienten, misst.Leitung: Dr.-Ing. Focke Jarecki, Dr.-Ing. Karen Insa WolfJahr: 2004Laufzeit: WiSe 2004 - SoSe 2005
-
Aufbau eines Kontrollnetzes im Bodensenkungsgebiet WunstorfDas 1898 in Betrieb genommene Kaliwerk Sigmundshall liegt im Ort Bokeloh, westlich der Stadt Wunstorf. Betreiber ist die K+S KALI GmbH aus Kassel. Die Lagerstätte des Salzstockes Bokeloh wird nach den geologischen Großstrukturen im Niedersächsischen Becken zur Steinhuder-Meer-Linie gerechnet. Die in Nordwest-Südost-Richtung verlaufende, längliche Salzstruktur ist etwa 12 km lang und nahe der Oberfläche im Mittel 1 km breit.Leitung: Dr.-Ing. Hans Neuner, Dipl.-Ing. Rainer Heer, Dipl.-Ing. Olaf BielenbergJahr: 2006Laufzeit: WiSe 2006 - SoSe 2007
-
Untersuchung der fennoskandischen Landhebung mit GRACE- und terrestrischen DatenSeit dem glazialen Maximum der letzten Eiszeit vor etwa 18.000 Jahren hebt sich in Fennoskandien (Dänemark, Norwegen, Schweden und Finnland) die Erdoberfläche kontinuierlich. Mit dem Abschmelzen der damals bis zwei Kilometer mächtigen Eislast hat ein lang anhaltender Aufwölbungsprozess des Baltischen Schildes begonnen. Das leichtere, feste Material der Erdrinde (Lithosphäre) schwimmt auf einer fließfähigen, dichteren Unterlage, der Asthenosphäre, und strebt ein Schwimmgleichgewicht (ähnlich einem Eisberg oder Schiff, Isostasie) an. Die maximale Hebung liegt gegenwärtig bei etwa einem Zentimeter pro Jahr im Bereich des Bottnischen Meerbusens; seit der Eiszeit ist hier das Land um circa 300 Meter angehoben worden. Damit sind aber auch Landsenkungen in den umliegenden Ländern verbunden, da aus dieser Peripherie Magma in Richtung Hebungszentrum abfließt. Zur Senkungszone gehört auch Deutschland mit Abwärtsbewegungen bis zu etwa 1.5 Millimetern pro Jahr.Leitung: Dr.-Ing. Heiner Denker, Dr.-Ing. Ludger TimmenJahr: 2007Laufzeit: WiSe 2007 - SoSe 2008
-
Projektseminar FireNet 2009/2010 (IfE & IKG)In Deutschland müssen die örtlichen Feuerwehren laut dem Statistischen Bundesamt bis zu 3,7 Millionen Mal im Jahr ausrücken. Die Einsätze sind dabei vielfältig und zum Teil sehr gefährlich. Sie reichen von der Bergung von Tieren über Krankentransporte bis hin zu der Rettung bei Katastrophen und Bränden. Auch wenn die Hauptaufgabe darin besteht, die Sicherheit der Bürger zu gewährleisten, darf der Schutz der Feuerwehrleute dabei nie vernachlässigt werden.Leitung: Dr.-Ing. Claus Brenner, Dr.-Ing. Markus VennebuschJahr: 2009Laufzeit: WiSe 2009 - SoSe 2010
-
Konsistenzprüfung von Quasigeoid und Höhensystem durch Präzisions-GNSS an Nivellementpunkten im HarzZurzeit wird das Höhensystem in Deutschland grundlegend erneuert: durch die Neumessung des Nivellementnetzes erster Ordnung, durch neue homogene GNSS Vertikal-Grundnetze und durch verbesserte Geoidmodelle unter Nutzung von GRACE- und GOCE- Satellitendaten. Dabei stellt sich die Frage der Qualität und Konsistenz dieser drei Komponenten des Höhensystems, also nach der Größe und Charakteristik der Restfehler. Davon hängt ab, wie genau in beliebigen Punkten physikalische (Normal-)Höhen - ohne Nivellement - aus GNSS- Messungen und (Quasi-)Geoidmodell bestimmt werden können, eine beispielsweise für Ingenieurprojekte relevante Aufgabe. Ein geeigneter Test dieser Fragestellung ist, sehr genaue GNSS-Messungen an ausgewählten Punkten mit vorhandenem Präzisionsnivellement durchzuführen und die Residuen in dem Budget ellipsoidische Höhe - Normalhöhe - Quasigeoidundulation zu untersuchen.Leitung: Prof. Jakob Flury, Markus Antoni, Sibylle VeyJahr: 2011Laufzeit: WiSe 2011 - SoSe 2012
-
Massenvariationen in der Schleusenanlage Bolzum: Vergleich von Modellierungen mit Gravimetrischen MessungenEin Ziel von gravimetrischen Messungen ist, den Schwereeinfluss von Massenvariationen in der direkten Umgebung zu ermitteln. Zur Modellierung des Schwereeinflusses einer Masse gibt es mehrere Verfahren, die im Rahmen eines einjährigen Projektes getestet wurden.Leitung: Dr.-Ing. Olga Gitlein, M.Sc. Manuel SchillingJahr: 2013Laufzeit: WiSe 2013 - SoSe 2014
-
Ultrapräzise Messungen in der GOCE-WiedereintrittsphaseDer Beginn der Wiedereintrittsphase des GOCE-Satelliten wurde durch das Abschalten des Ionentriebwerkes am 21.10.2013 gestartet. Das Ende der Wiedereintrittsphase wurde durch das Verglühen des GOCE-Satelliten in der Erdatmosphäre, über den Falkland-Inseln, am 11.11.2013 markiert. Im Rahmen der Arbeit wurden verschiedene Bereiche der Wiedereintrittsphase untersucht.Leitung: Prof. Dr.-Ing. Jakob Flury, Dr.-Ing. Akbar Shabanloui, Dr.-Ing. Majid NaeimiJahr: 2014Laufzeit: WiSe 2014 - SoSe 2015
-
Präzise Satellitenbahnmodellierung am Beispiel der neuen SWARM-MissionAktuell werden Satelliten in vielen wissenschaftlichen Disziplinen verwendet. Besonders bei der Bestimmung des Erdschwerefeldes ist es wichtig, den Satellitenorbit präzise zu kennen. In diesem Projektseminar wurde eine Software zur Modellierung und numerischen Integration von LEO-Bahnen in MATLAB implementiert und anhand eines Beispielsorbits der ESA-Mission „Swarm“ getestet.Leitung: Prof. Dr.-Ing. Jakob Flury, Dr.-Ing. Akbar Shabanloui, Dr.-Ing. Majid Naeimi, Dr.-Ing. Manuel SchillingTeam:Jahr: 2015Laufzeit: WiSe 2015 - SoSe 2016
-
Globales Schwerefeld mittels GRACE High-Low-Satellite-to-Satellite-Tracking / BeschleunigungsansatzDie Modellierung des Schwerefeldes gehört zu den zentralen Aufgaben der physikalischen Geodäsie. Mit einem präzisen Schwerefeldmodell können beispielsweise Prozesse wie die postglaziale Landhebung, der Meeresspiegelanstieg oder Eismassenverluste global und quantitativ erfasst werden. Das Ziel dieses Projektseminars ist die Bestimmung eines Schwerefeldmodells für den Dezember 2008 unter Nutzung der Daten von GRACE. Hier werden jedoch nicht die Abstandsdaten des Interferometers genutzt, sondern die Satelliten werden als freifallende Körper betrachtet.Leitung: Prof. Dr.-Ing. Jakob Flury, Dr.-Ing. Akbar Shabanloui, Dr.-Ing. Majid Naeimi, M.Sc. Christoph WallatJahr: 2016Laufzeit: WiSe 2016 - SoSe 2017
-
Navigation and Position Integrity for Inland Marine Transport VesselsGNSS-Signal quality on marine inland vessels; Navigation of marine inland vessels and signal challenges due to bridges; approaches like, e.g., virtual receiver (VirtRX) and kinematic baseline (KinBL) in combination with additional sensors (IMU) for inland marine vessel navigation (IVN)Leitung: Dr.-Ing. Tobias Kersten, Dipl.-Ing. Franziska Kube, Dipl.-Ing. Le RenJahr: 2017Laufzeit: WiSe 2017 - SoSe 2018
-
LLR - Analysemodell und ResiduenIn diesem Projektseminar sollte der Einfluss verschiedener Effekte auf die gemessene Entfernung zwischen Station und Reflektor untersucht werden. Neben der Modellierung und Bestimmung der entsprechenden Größenordnung und Periodizitäten der Effekte wurde der Einfluss auf reale LLR Messungen anhand der Residuen eines selbst erstellten LLR-Auswertemodells untersucht.Leitung: Prof. Dr.-Ing. Müller, Dr.-Ing. HofmannJahr: 2018Laufzeit: WiSe 2018/2019
-
Multi-sensor Climatology onboard GRACEThe thermosphere lies between the exosphere and the mesosphere. The temperature in this layer can reach up to 4,500 degrees Fahrenheit. The thickness of this layer is about 513 km [NASA, 2018]. The thermosphere is the top level of the Earth atmosphere, located from 100 to 1000 km altitude. At 100 km already, the air density is twelve orders of magnitude lower than at the Earth’s surface. However, the remaining air is enough to exert a significant force on satellites orbiting the Earth at low heights. This perturbation is mainly due to high orbital velocity of 7.5 km/s, and the proportional relation between the air drag and the square of the speed. Since the space-borne accelerometer could measure the total non-conservative accelerations acting on the satellites directly, the air drag component could be isolated with the help of solar and earth albedo radiation pressure models, then the atmospheric density can be estimated, which provides necessary data for making evaluation and improvement of the existing atmospheric models.Leitung: Prof. Dr.-Ing. Jakob Flury, Dr.-Ing. Akbar ShabanlouiJahr: 2018Laufzeit: WiSe 2018/2019





