Terrestrial Gravimetry
-
Absolute gravimetry in DenmarkLed by: Dr.-Ing. Ludger TimmenTeam:Year: 2003
![]()
![]()
-
Improved compensation of vibrational noise in the laser interferometer with applications in absolute gravimetryLed by: Dr. Sergiy SvitlovYear: 2011Funding: DFGDuration: 2011 - 2018
-
A mobile absolute gravimeter based on atom interferometry for highly accurate point observationsAtom interferometers have demonstrated a high sensitivity to inertial forces. The Gravimetric Atom Interferometer (GAIN), developed at Humboldt-Universität zu Berlin, is a mobile atom interferometer based on interfering ensembles of laser-cooled Rb-87 atoms in an atomic fountain configuration. In the continued development state-of-the-art superconductiong gravimeters and laser-interferometer based absolute gravimeters are used for comparisons with and the characterization of GAIN.Led by: Prof. Dr.-Ing. Jürgen MüllerTeam:Year: 2012Funding: DFG
![]()
![]() © IFE / M. Schilling
© IFE / M. Schilling
-
Traceability of the FG5X-220 to the SI unitsThe Micro-g LaCoste FG5 is a free-fall gravimeter with a laser interferometer in Mach-Zehnder configuration which uses simultaneous time and distance measurements to calculate the absolute value of g. The instrument itself contains the necessary standards, a rubidium oscillator and a He-Ne Laser, and operates independent of external references. These internal standards need regular comparisons.Led by: Dr.-Ing. Ludger TimmenTeam:Year: 2012
![]()
![]() © IfE / M. Schilling
© IfE / M. Schilling
-
Establishing an Advanced Mexican Gravity Standardization BaseThis joint research project serves for following main scientific objectives: a) supporting the realization of a state of the art national gravity standard in Mexico fulfilling highest accuracy demands in metrology, b) supporting the establishment of a base for a national reference frame for geo-scientific purposes, c) supporting the improvement of a global gravity potential field model for fundamental research in earth scienceLed by: Dr.-Ing. Ludger TimmenTeam:Year: 2016Funding: Physikalisch-Technische Bundesanstalt Braunschweig
![]()
![]()
-
Gravimetric reference network for a 10m atom interferometerThe Very Long Baseline Atom Interferometer (VLBAI) at the Hannover Institute for Technology (HITec) is a physics instrument in which experiments on the interferometry of atoms can be carried out over a free-fall distance of about 10m. These experiments are mainly used for fundamental physics, but gravimetric measurements can also be performed. Due to the large fall distance and the resulting long fall time of the atoms, a future accuracy in the range of 1 nm/s² is anticipated. With classical transportable absolute gravimeters, however, some tens nm/s² are achieved. The VLBAI could therefore be a reference for classical gravimeters. For these experiments and for the evaluation of the error budget, however, knowledge of the local gravitational field is necessary. This will be determined in parallel to the installation of the large-scale instrument and further on by gravimetric measurements and forward modelling.Led by: Dr.-Ing. Manuel Schilling, Dr.-Ing. Ludger TimmenTeam:Year: 2017Funding: IfE, SFB-1128, EXC-2123 "QuantumFrontiers"Duration: 2017-2025
![]()
![]() © M. Schilling
© M. Schilling
-
Gravimetric Tides and Gravity Currents in the North SeaThe research group is investigating the gravity and deformation (tilt) effect caused by time variations of the mass distribution in the atmosphere and in the sea. It has to be distinguished between the direct Newtonian attraction effects and indirect loading effects. The latter part is accompanied by a vertical shift and a tilt of the sea floor as well as the land surface, especially along the coast or on islands, because of the elasticity of the solid Earth’s crust. Such a vertical ground displacement is associated with an absolute height change of the gravimeter w.r.t. the geocenter. The combined observation of gravity and tilt changes allows the separation of signals due to attraction and load deformation.Led by: Dr.-Ing. Ludger Timmen, Dr. Adelheid WeiseTeam:Year: 2018Funding: IfE, Germany’s Excellence Strategy – EXC-2123 “QuantumFrontiers”Duration: 2018-2021
![]()
![]()
-
Gravimetry at Zugspitze and Wank Mountains (Bavarian Alps, Germany)The geodetic monitoring of variations caused by Alpine orogency and the diminishing permafrost are undertaken with gravimetric as well as geometric techniques. In addition to IfE (absolute and relative gravimetry, levelling), the Bavarian Academy of Sciences and Humanities (GNSS, levelling, relative gravimetry), the Institute of Astronomical and Physical Geodesy - Technical University of Munich (relative gravimetry) and the Helmholtz Centre Potsdam - GFZ German Research Centre for Geosciences (superconducting gravimetry, GNSS permanent geodynamic observatory on the Zugspitze) are involved in the cooperation.Led by: Dr.-Ing. Ludger TimmenYear: 2018Funding: IFE, Germany’s Excellence Strategy – EXC-2123 “QuantumFrontiers”, GFZ Potsdam, TU München, Bayerische Akademie der Wissenschaften
![]()
![]()
-
Optical Clocks for Chronometric Levelling (CRC 1464, A04)We will realise the potential of chronometric levelling by demonstrating off-campus height measurements with the same or better resolution than geometric levelling and the Global Navigation Satellite System (GNSS)/geoid approach can presently achieve, in joint campaigns with project A05. This demonstration will be strengthened by the application of our measurement capabilities to geodetic problems of high relevance through cooperation with the TerraQ projects employing gravimetric and GNSS techniques to e.g. monitor water storage and other mass changes (projects Terrestrial Clock Networks: Fundamental Physics and Applications (C02), Modelling of Mass Variations Down to Small Scales by Quantum Sensor Fusion (C05), and Atmosphere-Ocean Background Modelling for Terrestrial Gravimetry (C06)).Led by: PD Dr. Christian Lisdat, Prof. Dr. Piet O. Schmidt, Dr.-Ing. DenkerTeam:Year: 2021Funding: DFG
-
Validation of Quantum Gravimeter QG-1 for Hydrology (CRC 1464, C01)For the groundwater management in central Europe, ground-based gravimetry provides a unique potential to monitor temporal variations in the subsurface water content for local areas. The atomic Quantum Gravimeter-1 (QG-1) of Leibniz Universität Hannover (LUH) is in its final phase of development (A01) and will be ready for geodetic and gravimetric applications latest in 2021. The QG-1 capability will be demonstrated indoor and also in a field application as an advanced absolute gravimeter allowing effectively the surveying of gravity variations due to groundwater changes on the uncertainty level of 10 nm/s².Led by: Dr.-Ing. Heiner Denker, Dr.-Ing. Ludger TimmenTeam:Year: 2021Funding: DFG
-
Quantum Gravimetry (CRC 1464, A01)Within TerraQ we aim to establish atom-chip based Quantum Gravimetry with Bose-Einstein condensates (BECs) and explore its potential for mobile gravimetry. Deploying QG-1 (Quantum Gravimeter) with steadily increasing frequency and performance in measurement campaigns for C01, A05 and C05 will allow us to prove the in-field applicability of the associated methods and demonstrate an operation of QG-1 under varying, rough conditions.Led by: Dr. Waldemar Herr, Prof. Dr.-Ing. Jürgen Müller, Prof. Dr. Ernst RaselTeam:Year: 2021Funding: DFG
-
Atmosphere-Ocean Background Modelling for Terrestrial Gravimetry (CRC 1464, C06)We will focus on the development of global background models of atmosphere and ocean dynamics that are applicable to gravity records taken anywhere at the Earth’s surface. The background models will be split into deformation effects that also consider the laterally heterogeneous rheology of the Earth’s crust, regional-to-global attraction effects of both atmospheric and oceanic mass variability along the strategy outlined by, and the local effects from the direct vicinity of the sensor that are most sensible to the local topographic roughness and that might benefit most from a possible augmentation with barometric observations taken around the gravity sensor.Led by: Dr. Henryk Dobslaw, Dr.-Ing. Ludger TimmenTeam:Year: 2021Funding: DFG













Gravity Field and Geoid Modelling
-
GOCE-GRavitationsfeldANalyse Deutschland – GOCE-GRAND II WP220 – Regionales Validierungs- und KombinationsexperimentWithin the framework of the project, high-quality validated terrestrial gravity field data sets (in particular deflections of the vertical and gravity data) were generated in Germany and Europe for the external validation of GOCE products. These data were used for the validation of existing satellite gravity models on the one hand and for the calculation of corresponding combined quasigeoid solutions for Germany and Europe on the other hand.Led by: Dr.-Ing. Heiner Denker (WP220 - IfE)Team:Year: 2005Funding: Research and development programme GEOTECHNOLOGIEN, funded by the Federal Ministry of Education and Research (BMBF) and the German Research Foundation (DFG), Förderkennz. 03F0421DDuration: 01.09.2005 – 31.08.2008
-
The recovery of Earth’s global gravity field from GOCE observationsThe ESA’s GOCE (Gravity field and steady-state Ocean Circulation Explorer) mission was the first to jointly apply SGG (satellite gravity gradiometry) and SST-hl (satellite-to-satellite high-low tracking) techniques to map the Earth’s gravity field. It delivered hundreds of millions of observations in four years’ lifetime, from 2009 to 2013. My Ph.D work is to recover a global gravity field model that is described by 62,997 spherical harmonic coefficients (up to degree/order 250) from the huge amount of GOCE observations.Led by: Prof. Dr.-Ing. Jürgen MüllerTeam:Year: 2011Funding: StipendiumDuration: 2011-2016
![]()
![]()
-
High-resolution modeling of geoid-quasigeoid separationLed by: Prof. Dr.-Ing. Jakob FluryYear: 2013
![]()
![]()
-
Regional gravity field modeling & relativistic geodesy (CRC 1128, C04)Led by: Dr.-Ing. Heiner DenkerTeam:Year: 2014Funding: Deutsche Forschungsgemeinschaft (DFG)Duration: 01.07.2014 – 30.06.2018
-
Modelling of Mass Variations Down to Small Scales by Quantum Sensor Fusion (CRC 1464, C05)Observing the temporal variations of the Earth gravity field by satellite gravimetry, terrestrial gravimetry or loading time series via GNSS gives insight into the temporal and spatial changes in the distribution of water on various scales. The overall aim of this project is to develop models of regional time-variable gravity (or, equivalently, of total water storage variations) at uttermost high spatial and temporal resolution by the consistent integration of the various geodetic sensors. The project thus tackles one of the currently most pressing challenges in geodesy and its dependent geophysical applications.Led by: Prof. Dr.-Ing. Annette Eicker, Prof. Dr. Andreas Günther, Dr. Matthias WeigeltTeam:Year: 2021Funding: DFG
-
Quantum-based acceleration measurement on geodesy satellites (Q-BAGS)Collaboration between the Observatoire de Paris Department Systèmes de référence temps-espace (SYRTE) and the Institute of Geodesy (IfE) of Leibniz Universität Hannover (LUH) embedded in the QUANTA research cooperation between Germany and France.Led by: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2021Funding: BMWK / DLR e.V. (50WM2181)Duration: 10/2021 - 09/2024




Relativistic Geodesy
-
Relativistic effects in satellite constellations (CRC 1128, C02)Led by: Dr.-Ing. habil. Enrico Mai, Dr. Eva Hackmann (ZARM), Prof. Dr. Claus Lämmerzahl (ZARM)Team:Year: 2014Funding: DFG
-
Clock network modeling (CRC 1128, C03)Led by: Prof. Dr. Jürgen Müller, Prof. Dr. Claus LämmerzahlTeam:Year: 2014Funding: DFG
-
Transportable optical clock for relativistic geodesy (CRC 1128/2, A03)Led by: Priv.-Doz. Dr. Christian Lisdat, Prof. Dr. Piet O. Schmidt, Dr.-Ing. Heiner DenkerTeam:Year: 2018Funding: German Research Foundation (DFG)Duration: 01.07.2018 – 30.06.2019
-
Relativistic investigations with LLR dataLed by: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2019Funding: Germany’s Excellence Strategy – EXC-2123 QuantumFrontiers (DFG)Duration: 2019 - 2025
-
Chronometrisches NivellementLed by: Dr.-Ing. Heiner DenkerTeam:Year: 2019Funding: verschiedene Landes- und Drittmittel sowie separate ProjekteDuration: seit 2010
-
High-performance clock networks and their application in geodesyThe rapid development of optical clocks and frequency transfer techniques provides the opportunity to compare clocks’ frequencies at the uncertainty level of 10-18. This will enable relativistic geodesy with the aimed accuracy of cm in terms of height. Clock networks are thus highly relevant to various geodetic applications, such as the realization of a height reference system and the determination of regional/global gravity fields. In this project, we aim to investigate the potential of high-performance clock networks and quantify their contributions to specific applications through dedicated simulations.Led by: Prof. Dr.-Ing. Jürgen MüllerTeam:Year: 2019Funding: Germany’s Excellence Strategy – EXC-2123 “QuantumFrontiers” (DFG)
-
Improved modelling of the Earth-Moon systemLed by: Prof. Dr.-Ing. Jürgen MüllerTeam:Year: 2020Funding: DLR-SIDuration: 2019 - 2022
-
Terrestrial Clock Networks: Fundamental Physics and Applications (CRC 1464, C02)The continuous developments of optical clocks and the long-distance links via fibers, especially within TerraQ, will give access to terrestrial clock networks in practice, which will enable the novel measurement concept of chronometric levelling. From a theoretical perspective, this project will elaborate the rigorous relativistic formalism for clock-based geodesy and assess the effects of approximations in different scenarios. Furthermore, this project will figure out the most promising applications for clock networks in geodesy and fundamental physics.Led by: Prof. Dr.-Ing. Jürgen Müller, Prof. Dr. Claus LämmerzahlTeam:Year: 2021Funding: DFG
-
Differential Lunar Laser RangingLed by: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2021Funding: Germany’s Excellence Strategy – EXC-2123 QuantumFrontiers (DFG), DLR-SIDuration: 2021 - 2022
Satellite Gravimetry
-
GOCE-GRavitationsfeldANalyse Deutschland – GOCE-GRAND AP6 – Bestimmung äußerer Eichfaktoren und Validierung der ErgebnisseThe project investigated methods for calibration and validation of GOCE results with external gravity field data.Led by: Prof. Dr.-Ing. Reiner RummelTeam:Year: 2002Funding: Research and development programme GEOTECHNOLOGIEN, funded by the Federal Ministry of Education and Research (BMBF) and the German Research Foundation (DFG)Duration: 01.01.2002 – 31.12.2004
-
Earth System Mass Transport Mission (e.motion)Led by: Jakob FluryYear: 2013
![]()
![]()
-
Fusion of ranging, accelerometry, and attitude sensing in the multi-sensor system for laserinterferometric inter-satellite ranging (CRC 1128, B02)The quality of gravity field results obtained from GRACE and GRACE Follow-On inter-satellite ranging does not only depend on the ranging measurement accuracy. Equally important is the quality of the integration in the multi-sensor system consisting of inter-satellite ranging, GNSS orbit tracking, accelerometry, and attitude sensing, and the performance of this system as a whole. The system performance is influenced, e.g., by star camera attitude performance, by the characteristics of satellite pointing jitter coupling, by inaccurate knowledge and instabilities of phase centers and alignments, and by accelerometer signal disturbances.Led by: Prof. Jakob Flury, Dr. Gerhard HeinzelTeam:Year: 2014Funding: DFGDuration: 2014-2018
![]()
![]()
-
High performance satellite formation flight simulator (CRC 1128, B05)Led by: Dr. Meike List (ZARM), Dr.-Ing. Benny Rievers (ZARM)Team:Year: 2014Funding: DFG
-
System studies for an optical gradiometer mission (CRC 1128, B07)Led by: Dr. Gerhard Heinzel, Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2014Funding: DFG
-
Data analysis challenge for the GRACE-FO community (CRC 1128, B04)Led by: Dr.-Ing. Majid Naeimi, Dr. Martin Hewitson, Dr. Meike ListTeam:Year: 2015Funding: DFG
-
Hybridization of Classic and Quantum Accelerometers for Future Satellite Gravity MissionsUsing cold atom interferometry (CAI) accelerometers in the next generation of satellite gravimetry missions can provide long-term stability and precise measurements of the non-gravitational forces acting on the satellites. This allows for a reduction of systematic effects in current GRACE-FO gravity field solutions. In this project, we first aim to investigate the hybridization of quantum CAI-based and classical accelerometers for a GRACE-like mission and we discusse the performance improvement through dedicated simulations. Then we investigate different orbital configurations and mission concepts to find the optimal setting for future satellite gravimetry missions.Led by: Prof. Dr.-Ing. MüllerTeam:Year: 2020
-
New Measurement Concepts with Laser Interferometers (CRC 1464, B01)We will study a new type of optical accelerometer (ACC) and gradiometer, advance Laser Ranging Interferometry (LRI) technology conceptually to enable new satellite constellations, and investigate observations of the angular line-of-sight velocity for gravity field recovery with simulations.Led by: Prof. Dr.-Ing. Jürgen Müller, Dr. Vitali MüllerTeam:Year: 2021Funding: DFGDuration: 2021-2024




Antenna Calibration
-
Gewinn eines grundlegenden Verständnisses der Mehrwege - Antennen - Empfänger - Interaktionen zur Standardisierung der Kalibrierung von Codephasenvariationen von GNSS-EmpfangsantennenLed by: Prof. Dr.-Ing. Steffen Schön, Dr.-Ing. Tobias KerstenTeam:Year: 2022Funding: DFG, Project number: 470510446
-
Accurate prediction of GNSS antenna performance in automotive scenarios - AccurautoThe German federal state authorities operate GNSS correction data services for precise localisation using satellite navigation systems (GNSS). However, this data is seldom used for vehicle localisation. However, the reason for this is that large errors are caused by the vehicle's receiving antennas. Low-cost vehicle antennas have been measured to have errors of up to several metres, and strong correlations with vehicle type and installation location have been demonstrated. This leads to unresolved challenges in the calibration of GNSS receiving antennas for vehicles.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2024Funding: Federal Ministry for Digital and Transport (BMDV), grant number: 19F1189B
GNSS and Inertial Navigation
-
Investigations of distance dependent systematic effectsCorrection models for distance dependent effects in small GPS networksLed by: Dr.-Ing. Steffen SchönTeam:Year: 2006
-
Assessment of remaining systematic effects by interval mathematicsAssessment of remaining systematic effects by interval mathematicsLed by: Prof. Dr.-Ing. Steffen SchönYear: 2006Funding: Deutsche Forschungsgemeinschaft (DFG)
-
Bürgernahes FlugzeugImprovement of quality and decrease of signal loss during GNSS-based curved landing approaches as part of the development of a "Metropolitain Aircraft".Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2011Funding: Government of Lower Saxony
![]()
![]()
-
Navigation und Positionierung in difficult enviornmentsAnalyse of High-Sensitivity GNSS SensorsLed by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2011
![]()
![]()
-
Modelling physical correlation of GNSS phase observations by means of turbulence theoryModelling of physikal Correlations on GNSS Phase Observables using the Approach of turbulence theoryLed by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2011Funding: DFG (SCHO 1314/1-1).
![]()
![]()
-
Modeling and correction of GNSS multipath effect through Software receiver and Ray tracingDescribing Multipath by Software receiver and Ray tracing.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2011Funding: BMWI and German Aerospace Center (DLR)
-
Turbulence investigations and improved modelling of atmospheric refraction with VLBI and GNSSImproved characterization of refractivity fluctuations, determination of turbulence parameters and enhanced modelling of neutrospheric refraction effectsLed by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2012Funding: DFG (SCHO 1314/3-1)
-
Verbesserte Positionierung und Navigation durch konsistente Multi-GNSS AntennenkorrekturenInvestigation of effects of code phase delays (GDV) on the GNSS-based positioning and navigation as well as the development of a method for an adequate comparison of different calibration results.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2012Funding: BMWI | 50NA1216
![]()
![]()
-
Kinematic GNSS positioning of Low Earth Orbiters (CRC 1128, B03)Strengthening the accuracy of kinematic orbits of Low Earth Orbiters through an adopted Precise Point Positioning (PPP) enhanced by GNSS Receiver Clock Modeling and the concept of a Virtual Receiver is the overall objective of this project.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2014Funding: DFG
![]()
![]()
-
Integrity Monitoring for Network RTK SystemsFrom the advent of the satellite positioning techniques, civil users have always been trying to find a way to have more accurate and precise coordinates of their position. Differential concepts, from early days of GPS, have been considered. Applying the RTCM format, made the transmission of corrections possible from reference stations to the users. At first stage the corrections were casted to the users from one single station, which is called single RTK (Real Time Kinematic). This method is limited in some ways; degrading by increasing distance from CORS (Continuously Operating Reference Station), needed same signals at reference and rover and remaining the reference station errors. For compensating these shortages, the Network RTK concept appeared. In NRTK the corrections are produced using a network (at least three) of reference stations. The concept of Precise Point Positioning (PPP) is currently associated with global networks. Precise orbit and clock solutions are used to enable absolute positioning of a single receiver. However, it is restricted in ambiguity resolution, in convergence time and in accuracy. Precise point positioning based on RTK networks (PPP-RTK) overcomes these limitations and gives centimeter-accuracy in a few seconds.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2018Funding: German Academic Exchange Service (DAAD)
-
Collaborative Navigation for Smart Cities (GRK 2159)Global Navigation Satellite Systems (GNSS) is the only navigation sensor that provides absolute positioning. However, urban areas form the most challenging environment for GNSS to achieve a reliable position. Because of the reduced satellite visibility and disturbed signal propagation like diffraction and multipath, the resulting position has a reduced accuracy and availability. The overall research objective of this project is to reduce these shortcomings through collaboration. Therefore, similarity of multipath at different locations within streets will be studied.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2019Funding: Deutsche Forschungsgemeinschaft (DFG) - Graduiertenkolleg GRK 2159
-
QGyro: Quantum Optics Inertial Sensor ResearchThe objective of this research programme is to develop and test high-precision quantum inertial sensors that support conventional inertial navigation sensors in order to expand these sensors to up to 6 degrees of freedom and use them for autonomous navigation in various further development stages.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2019Funding: Federal Minitry of Economics and Climate Affairs (BMWK / DLR), grant number: 50RK1957Duration: 2019 - 2022
![]()
![]()
-
FIRST: Fingerprinting, Integrity Monitoring and Receiver Signal Processing Using Miniature Atomic Clock TechnologyIn order to improve the performance of the determination of position, velocity and time by means of GNSS measurements, nowadays Chip Scale Atomic Clocks (CSACs) are frequently used, which provide a highly stable frequency signal to the GNSS receiver. However, until now, the improvement of the navigation solution has only been algorithmic. In this project, the influence of the receiver clock on the quality of signal processing in a software receiver will be investigated by adapting the internal processing steps to the high frequency stability of the CSAC signal. In addition, the feasibility of fingerprinting with highly stable atomic clocks under different dynamic conditions will be investigated and additional integrity measures for GNSS-based time transfer will be developed.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2020Funding: Bundesministerium of Economy and Energy (BMWi), grant number: 50NA2101
![]()
![]()
-
Correction of GNSS multipath effects for reliable autonomous localisation of highly automated vehicles in metropolitan areas (KOMET)The code range (code measurement) used in automotive applications often cannot provide the required resolution of the location due to the high measurement noise. The complex GNSS signal propagation (signal shading, multipath effects) in urban environments makes the determination of an accurate and robust positioning solution a particularly challenging task - e.g. for positioning in narrow street canyons. The research project aims to develop and implement innovative correction methods to reduce multipath effects in order to improve carrier phase-based GNSS positioning.Led by: Prof. Dr.-Ing. Steffen Schön, Dr.-Ing. Tobias KerstenTeam:Year: 2020Funding: BMWi / TÜV Rheinland Consulting GmbH
![]()
![]() © Ch. Skupin (Bosch)
© Ch. Skupin (Bosch)
-
Bounding and propagating observation uncertainty with interval mathematic (GRK 2159)Intervals (Jaulin et al 2001) can be seen as a natural way to bound observation uncertainty in navigation systems such as GPS, IMU or optical sensors like LIDAR, since they are in principle free of any assumption about probability distributions and can thus describe adequately remaining systematic effects (Schön 2016, Schön and Kutterer 2006). In this project, we intent to experimentally investigate in more details the actual size of observation intervals.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2020Funding: Deutsche Forschungsgemeinschaft (DFG) - Graduiertenkolleg GRK 2159
-
Interferometric Fibre Links (CRC 1464, A05)The overarching goal, to establish chronometric levelling as a routine tool for geodesy, requires research and developments for high precision frequency transfer in the areas of Interferometric Fibre Links (IFLs) and Global Naviation Satellite System - Frequency Transfer (GNSS-FT). The development of fieldable IFLs equipment, ultraprecise GNSS-FT and their use for chronometric levelling, are new areas of research and development, which will open up many applications of geodetic interest. We aim to realise an island-mainland chronometric levelling campaign using IFL and GNSS-FT, and the transportable optical clocks developed in A04.Led by: Prof. Dr.-Ing. Steffen Schön, Dr. Jochen KronjägerTeam:Year: 2021Funding: DFG
-
Gewinn eines grundlegenden Verständnisses der Mehrwege - Antennen - Empfänger - Interaktionen zur Standardisierung der Kalibrierung von Codephasenvariationen von GNSS-EmpfangsantennenLed by: Prof. Dr.-Ing. Steffen Schön, Dr.-Ing. Tobias KerstenTeam:Year: 2022Funding: DFG, Project number: 470510446
-
5GAPS: 5G Access to Public SpacesIn this research project, the positioning capabilities of the latest mobile communication standard 5G NR are investigated. Due to the increasing demand for communication and the widespread installation of 5G NR networks, terrestrial signal sources can provide an alternative or complement to GNSS signals when GNSS signals are unavailable or a limited by the environment.Led by: Prof. Dr.-Ing Steffen SchönTeam:Year: 2022Funding: Federal Ministry of Transport and Digital Infrastructure (BMDV), grant number: 45FG121_F
-
Development of a compact experimental platform of a gyro-stabilized quantum navigation sensor (QGyroPlus)The aim of the project is to develop a unique six-axis quantum inertial navigation sensor that enables drift-free and high-precision navigation for the first time. This pioneering technology will be tested as a compact experimental platform during the course of the project and could open the door to completely new areas of application in autonomous navigation.Led by: Prof. Dr. Steffen SchönTeam:Year: 2023Funding: Federal Ministry of Economics and Climate Affairs (BMWK / DLR), grant number: 50NA2106
![]()
![]()
-
Grant from the European Regional Development Fund (ERDF) and the state of Lower SaxonyIn this project, a DAB-to-GNSS receiving module is developed that can receive and process GNSS corrections via DAB technology. It will be tested in comparison to mobile communications. The evaluation includes quantitative and qualitative investigation of the data stream and practical tests of the module in GNSS applications. The project is a cooperation with RFmondial GmbH.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2023Funding: Grant from the European Regional Development Fund (ERDF) and the state of Lower Saxony in the funding scheme "Innovationsförderprogramm für Forschung und Entwicklung"
-
Navigation with Quantum Sensors in Space (SpaceQNav)The project is focused on research on innovative quantum inertial sensor technology to improve space navigation. The objective is to significantly increase navigation performance by revolutionizing precision and long-term stability for missions from Earth orbit to the lunar surface. By analysing design requirements and evaluation strategies, the full potential of this technology will be exploited.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2023Funding: Federal Ministry of Economy and Climate Affairs (BMWK/DLR), grant number: 50NA2310A
-
Modelling Quantum Sensors in a Realistic Navigation System Context – SimulaQrUmPositioning, navigation and timing are crucial for modern systems in transportation, agriculture and aerospace, but conventional GNSS signals often reach their limits, for example in cities or underwater. This project, together with partners such as the Institute of Quantum Optics (IQO) and Airbus Defense and Space, is developing a new simulation tool to make navigation solutions more reliable and stable by combining quantum sensors and inertial sensors.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2024Funding: European Space Agency (ESA), Förderkennzeichen: NAVISP-EL1-089
![]()
![]() © IQO
© IQO
-
Accurate prediction of GNSS antenna performance in automotive scenarios - AccurautoThe German federal state authorities operate GNSS correction data services for precise localisation using satellite navigation systems (GNSS). However, this data is seldom used for vehicle localisation. However, the reason for this is that large errors are caused by the vehicle's receiving antennas. Low-cost vehicle antennas have been measured to have errors of up to several metres, and strong correlations with vehicle type and installation location have been demonstrated. This leads to unresolved challenges in the calibration of GNSS receiving antennas for vehicles.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2024Funding: Federal Ministry for Digital and Transport (BMDV), grant number: 19F1189B
-
Deformation Analysis Based on Terrestrial Laser Scanner Measurements (TLS-Defo, FOR 5455, Project 5)Our research aims to enhance the Terrestrial Laser Scanning (TLS) uncertainty budget by developing strategies for deterministic observation intervals and transforming error bands into point uncertainties. We are also introducing distribution-free surface uncertainty measures to improve the precision and reliability of TLS data.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2024Funding: Deutsche Forschungsgemeinschaft (DFG) - Forschergruppe (FOR) 5455
-
IGNITE (Improving Integrity and Accuracy in Highly Automated Navigation Applications through GNSS Multipath Maps)In this project, a digital map is being developed that captures and provides information on GNSS signal propagation – in particular multipath and NLOS errors – in urban environments. AI models are used to interpolate mapped multipath errors at user positions and to predict errors at locations without real training data. The map enables improved weighting of GNSS signals in the receiver, thereby enhancing the accuracy, integrity, and availability of the positioning solution for highly automated vehicles in urban traffic. The project is being carried out in cooperation with Geo++ GmbH.Led by: Prof. Dr.-Ing. Jürgen MüllerTeam:Year: 2026Funding: Funding from the European Regional Development Fund (ERDF) under the special call “Strategic Technologies for Europe – STEP” for innovative collaborative projects in applied research.
-
NATIVE-SSR (Native navigation system with SSR corrections for high-precision GNSS positioning)This project aims to implement two different approaches for native support of State Space Representation (SSR) correction data in GNSS receivers. First, the SSR format will be converted to the Observation Space Representation (OSR) format and then made available to the receiver. Second, a method will be implemented to process SSR correction data directly within the GNSS receiver and to correct the generated position solution directly. This project is being carried out in cooperation with RFmondial GmbH.Led by: Prof. Dr.-Ing. Jürgen MüllerTeam:Year: 2026Funding: Grant from the European Regional Development Fund (ERDF) and the state of Lower Saxony.













Lunar Laser Ranging (LLR)
-
Lunar Laser Ranging: Konsistente Modellierung für geodätische und wissenschaftliche AnwendungenLed by: Prof. Dr.-Ing. Jürgen MüllerTeam:Year: 2006Funding: DFG
![]()
![]()
-
Barycentric EphemerisBarycentric EphemerisLed by: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2012Funding: DFG FOR1503 Reference Systems
![]()
![]()
-
Lunar Reference SystemsLed by: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2014Funding: DFG - FOR 1503Duration: 2014-2019
![]()
![]()
-
LLR contribution to reference frames and Earth orientation parametersLed by: Prof. Dr.-Ing. Jürgen MüllerTeam:Year: 2019Funding: Germany’s Excellence Strategy – EXC-2123 QuantumFrontiers (DFG), DLR-SIDuration: 2019 - 2025
-
Relativistic investigations with LLR dataLed by: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2019Funding: Germany’s Excellence Strategy – EXC-2123 QuantumFrontiers (DFG)Duration: 2019 - 2025
-
Improved modelling of the Earth-Moon systemLed by: Prof. Dr.-Ing. Jürgen MüllerTeam:Year: 2020Funding: DLR-SIDuration: 2019 - 2022
-
Differential Lunar Laser RangingLed by: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2021Funding: Germany’s Excellence Strategy – EXC-2123 QuantumFrontiers (DFG), DLR-SIDuration: 2021 - 2022


Space Sensor Technologies
-
In-Orbit System Analysis of the Gravity Recovery and Climate Experiment (GRACE) MissionPrecise determination and control of satellite attitude plays a key role for satellite geodesy in general, and for Satellite-to-Satellite Tracking in particular. The project provided the first in-depth characterization of GRACE pointing biases and pointing variations. Investigations addressed star camera inter-boresight angle variations, the weighted camera sensor head combination, as well as error propagation to inter-satellite ranging and accelerometer observations. Results led to significant improvements in the operational GRACE data processing.Led by: Prof. Jakob FluryTeam:Year: 2009Funding: Exzellenzcluster QUESTDuration: 2009-2015
![]()
![]() © IfE / Bandikova
© IfE / Bandikova
-
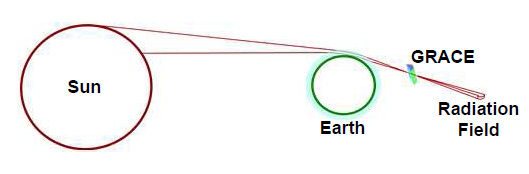
Highly physical penumbra solar radiation pressure modeling with atmospheric effectsDuring penumbra transitions of an Earth orbiter, the solar radiation hitting the satellite is strongly influenced by refraction and absorption of light rays grazing the Earth’s atmosphere. The project implemented solar radiation pressure modeling including these effects. Model results were tested by comparing with measurements of the accelerometers of the GRACE low Earth orbiters.Led by: Prof. Jakob Flury, Tamara BandikovaTeam:Year: 2010Funding: RISE/QUESTDuration: 2010
![]()
![]()
-
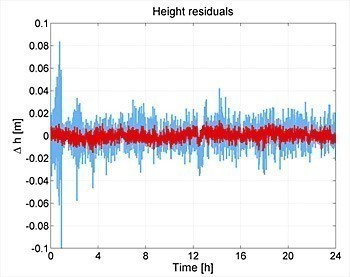
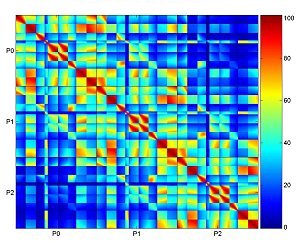
Disentangling gravitational signals and errors in global gravity field parameter estimation from satellite observations (SFB 1128, C01)Range-rate residuals from the estimation of global gravity field parameters from GRACE satellite-to-satellite tracking reveal a range of systematic effects that limit the accuracy of the estimated parameters. The project investigated the characteristics of time series of range-rate residuals. It addressed how drops in the K-band ranging signal-to-noise ratio at specific inter-satellite Doppler frequencies propagate to anomalies in range-rate residuals, as well as anomalies during penumbra transitions. A part of the project at TU Graz, in the group of Prof. Mayer-Gürr, studied options to use wavelet parameters in the SST gravity field parameter estimation.Led by: Prof. Jakob FluryTeam:Year: 2014Funding: DFGDuration: 2014-2018
-
Swarm ESL/DISC: Support to accelerometer data analysis and processingLed by: Prof. Dr.-Ing. Jakob FluryTeam:Year: 2016Funding: ESA (DTU Space)Duration: 2016-2020
-
Interactions of Low-orbiting Satellites with the Surrounding Ionosphere and Thermosphere Part II (INSIGHT II)At our Institute, we provide reduced and calibrated Swarm accelerometer data for the ESA Swarm data processing chain that are the basis for the determination of thermospheric density. This includes the accelerometer calibration by precise orbit determination of Swarm satellites.Led by: Prof. Dr.-Ing. Jakob FluryTeam:Year: 2018Funding: DFGDuration: 2018-2021



CRC 1128 (geo-Q)
-
Kinematic GNSS positioning of Low Earth Orbiters (CRC 1128, B03)Strengthening the accuracy of kinematic orbits of Low Earth Orbiters through an adopted Precise Point Positioning (PPP) enhanced by GNSS Receiver Clock Modeling and the concept of a Virtual Receiver is the overall objective of this project.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2014Funding: DFG
![]()
![]()
-
Relativistic effects in satellite constellations (CRC 1128, C02)Led by: Dr.-Ing. habil. Enrico Mai, Dr. Eva Hackmann (ZARM), Prof. Dr. Claus Lämmerzahl (ZARM)Team:Year: 2014Funding: DFG
-
Disentangling gravitational signals and errors in global gravity field parameter estimation from satellite observations (SFB 1128, C01)Range-rate residuals from the estimation of global gravity field parameters from GRACE satellite-to-satellite tracking reveal a range of systematic effects that limit the accuracy of the estimated parameters. The project investigated the characteristics of time series of range-rate residuals. It addressed how drops in the K-band ranging signal-to-noise ratio at specific inter-satellite Doppler frequencies propagate to anomalies in range-rate residuals, as well as anomalies during penumbra transitions. A part of the project at TU Graz, in the group of Prof. Mayer-Gürr, studied options to use wavelet parameters in the SST gravity field parameter estimation.Led by: Prof. Jakob FluryTeam:Year: 2014Funding: DFGDuration: 2014-2018
-
Clock network modeling (CRC 1128, C03)Led by: Prof. Dr. Jürgen Müller, Prof. Dr. Claus LämmerzahlTeam:Year: 2014Funding: DFG
-
Fusion of ranging, accelerometry, and attitude sensing in the multi-sensor system for laserinterferometric inter-satellite ranging (CRC 1128, B02)The quality of gravity field results obtained from GRACE and GRACE Follow-On inter-satellite ranging does not only depend on the ranging measurement accuracy. Equally important is the quality of the integration in the multi-sensor system consisting of inter-satellite ranging, GNSS orbit tracking, accelerometry, and attitude sensing, and the performance of this system as a whole. The system performance is influenced, e.g., by star camera attitude performance, by the characteristics of satellite pointing jitter coupling, by inaccurate knowledge and instabilities of phase centers and alignments, and by accelerometer signal disturbances.Led by: Prof. Jakob Flury, Dr. Gerhard HeinzelTeam:Year: 2014Funding: DFGDuration: 2014-2018
![]()
![]()
-
High performance satellite formation flight simulator (CRC 1128, B05)Led by: Dr. Meike List (ZARM), Dr.-Ing. Benny Rievers (ZARM)Team:Year: 2014Funding: DFG
-
Regional gravity field modeling & relativistic geodesy (CRC 1128, C04)Led by: Dr.-Ing. Heiner DenkerTeam:Year: 2014Funding: Deutsche Forschungsgemeinschaft (DFG)Duration: 01.07.2014 – 30.06.2018
-
Modeling of mass variations down to small scales (CRC 1128, C05)Led by: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2014Funding: DFG
![]()
![]()
-
System studies for an optical gradiometer mission (CRC 1128, B07)Led by: Dr. Gerhard Heinzel, Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2014Funding: DFG
-
Transportable quantum gravimeter (CRC 1128, A01)Led by: Prof. Dr. Jürgen Müller, Prof. Dr. Ernst M. RaselTeam:Year: 2014Funding: DFG
-
Data analysis challenge for the GRACE-FO community (CRC 1128, B04)Led by: Dr.-Ing. Majid Naeimi, Dr. Martin Hewitson, Dr. Meike ListTeam:Year: 2015Funding: DFG
-
Gravimetric reference network for a 10m atom interferometerThe Very Long Baseline Atom Interferometer (VLBAI) at the Hannover Institute for Technology (HITec) is a physics instrument in which experiments on the interferometry of atoms can be carried out over a free-fall distance of about 10m. These experiments are mainly used for fundamental physics, but gravimetric measurements can also be performed. Due to the large fall distance and the resulting long fall time of the atoms, a future accuracy in the range of 1 nm/s² is anticipated. With classical transportable absolute gravimeters, however, some tens nm/s² are achieved. The VLBAI could therefore be a reference for classical gravimeters. For these experiments and for the evaluation of the error budget, however, knowledge of the local gravitational field is necessary. This will be determined in parallel to the installation of the large-scale instrument and further on by gravimetric measurements and forward modelling.Led by: Dr.-Ing. Manuel Schilling, Dr.-Ing. Ludger TimmenTeam:Year: 2017Funding: IfE, SFB-1128, EXC-2123 "QuantumFrontiers"Duration: 2017-2025
![]()
![]() © M. Schilling
© M. Schilling
-
Transportable optical clock for relativistic geodesy (CRC 1128/2, A03)Led by: Priv.-Doz. Dr. Christian Lisdat, Prof. Dr. Piet O. Schmidt, Dr.-Ing. Heiner DenkerTeam:Year: 2018Funding: German Research Foundation (DFG)Duration: 01.07.2018 – 30.06.2019


QUEST
-
In-Orbit System Analysis of the Gravity Recovery and Climate Experiment (GRACE) MissionPrecise determination and control of satellite attitude plays a key role for satellite geodesy in general, and for Satellite-to-Satellite Tracking in particular. The project provided the first in-depth characterization of GRACE pointing biases and pointing variations. Investigations addressed star camera inter-boresight angle variations, the weighted camera sensor head combination, as well as error propagation to inter-satellite ranging and accelerometer observations. Results led to significant improvements in the operational GRACE data processing.Led by: Prof. Jakob FluryTeam:Year: 2009Funding: Exzellenzcluster QUESTDuration: 2009-2015
![]()
![]() © IfE / Bandikova
© IfE / Bandikova
-
Highly physical penumbra solar radiation pressure modeling with atmospheric effectsDuring penumbra transitions of an Earth orbiter, the solar radiation hitting the satellite is strongly influenced by refraction and absorption of light rays grazing the Earth’s atmosphere. The project implemented solar radiation pressure modeling including these effects. Model results were tested by comparing with measurements of the accelerometers of the GRACE low Earth orbiters.Led by: Prof. Jakob Flury, Tamara BandikovaTeam:Year: 2010Funding: RISE/QUESTDuration: 2010
![]()
![]()
-
Satellite Navigation using high precise OscillatorsExamination of high precise Oscillators in the application area of Satellite NavigationLed by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2011Funding: QUEST
![]()
![]()
-
Potential Field Determination and high precise OscillatorsDetermination of the Earth's Gravity Field using high precise OscillatorsLed by: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2011Funding: QUEST (Quantum Engineering and Space Time Research)
![]()
![]()
-
Earth System Mass Transport Mission (e.motion)Led by: Jakob FluryYear: 2013
![]()
![]()