-
Transport der TZK2-D zu Messungen mit Kleinbus.
-
Digitale Zenitkamera TZK2-D bei Messungen in den Alpen

Am Institut für Erdmessung wurde auf Grundlage der in früheren Jahren sehr erfolgreich eingesetzten konventionellen transportablen Zenitkamera TZK2 mit Hilfe moderner CCD Technologie das hochgenaue, transportable und weitgehend automatisierte Echtzeit-Zenitkamerasystem TZK2-D (Transportable Zenitkamera 2 - Digitalsystem) entwickelt. Auf der Grundlage der Fotografie von zenitnahen Sternen mit einem CCD-Sensor stellt das System die Lotrichtungsparameter (astronomische Breite und Länge) mit einer Genauigkeit von etwa 0,1 Bogensekunde bereit. Mit dem System werden in Verbindung mit einem GPS Empfänger astrogeodätische Lotabweichungen bestimmt, die zur hochauflösenden Schwerefeldbestimmung im lokalen und regionalen Bereich eingesetzt werden.
-
Verfahren
Das digitale Zenitkamerasystem besteht aus zwei Hauptkomponenten. Mit der Zenitkamera werden die Lotrichtungsparameter astronomische Breite Φ und Länge Λ bestimmt. Der integrierte GPS-Receiver liefert die ellipsoidischen Koordinaten Breite φ und Länge λ. Die astrogeodätischen Lotabweichungskomponenten in Nord-Süd-Richtung ξ und in Ost-West-Richtung η ergeben sich dann in linearer Approximation mit
ξ = Φ - φ
η = (Λ - λ) cos φ.Der Übergang von astrogeodätischen Lotabweichungen auf (Quasi)Geoidhöhen erfolgt entlang von Profilen mit Hilfe des astronomischen bzw. astronomisch-topographischen Nivellements.
-
Design
Das digitale Zenitkamerasystem TZK2-D setzt sich aus der transportablen Zenitkamera TZK2, einem CCD-Sensor (KX2E, Apogee) zur digitalen Bilderfassung, einem GPS-Empfänger (Z12, Ashtech) zur Zeitmessung und Bestimmmung der ellipsoidschen Koordinaten, zwei elektronischen Neigungssensoren HRTM und einem Industrierechner zusammen. Der Industrierechner dient zur Steuerung der Sensorik des Zenitkamerasystems, der Messdatenerfassung und -speicherung sowie der sofortigen Datenprozessierung im Felde. Das gesamte Messsystem inklusiv Recheneinheit ist in einem Stativwagen integriert, der für die Messung über drei Motorzylinder angehoben werden kann.
-
Sensorik
Hochgenaue Neigungsmessung mit den Sensoren HRTM
Hochpräzise Neigungssensoren vom Typ HRTM (High Resolution Tiltmeter, Lippmann Geophysikalische Messgeräte) werden verwendet, um den Bezug zwischen Kamera und physikalischer Lotrichtung mit einer Genauigkeit von 0.04 bis 0.05 Bogensekunden herzustellen.
Digitale Bilderfassung
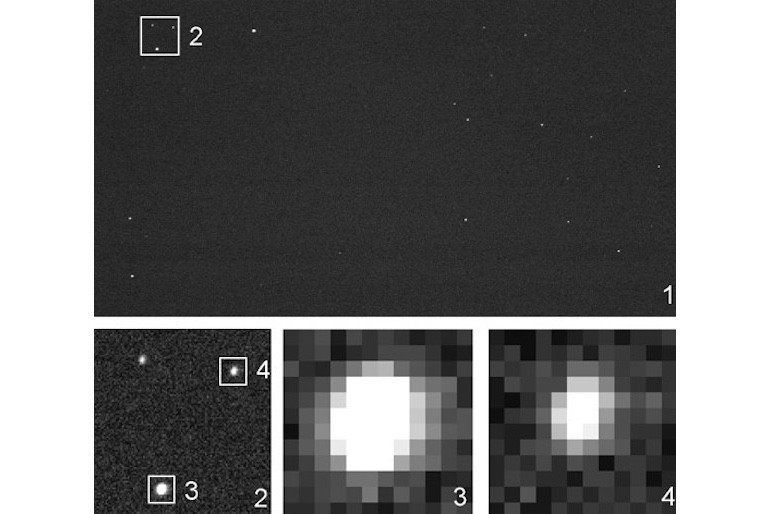
Herzstück der digitalen Zenitkamera ist der CCD-Sensor KAF 1602E mit 1530 x 1020 Bildelementen, mit dem Sterne bis zu einer scheinbaren Helligkeit von 14 mag erfasst werden können. Über die gesamte Himmelskugel verteilt stehen damit über 13 Millionen Sterne zur Bestimmung der Lotrichtung zur Verfügung. Das effektive Gesichtsfeld der Zenitkamera entspricht 47.4 x 31.6 Bogenminuten. Eine einzelne Zenitaufnahme enthält durchschnittlich 20-30 Sterne.
Datenprozessierung
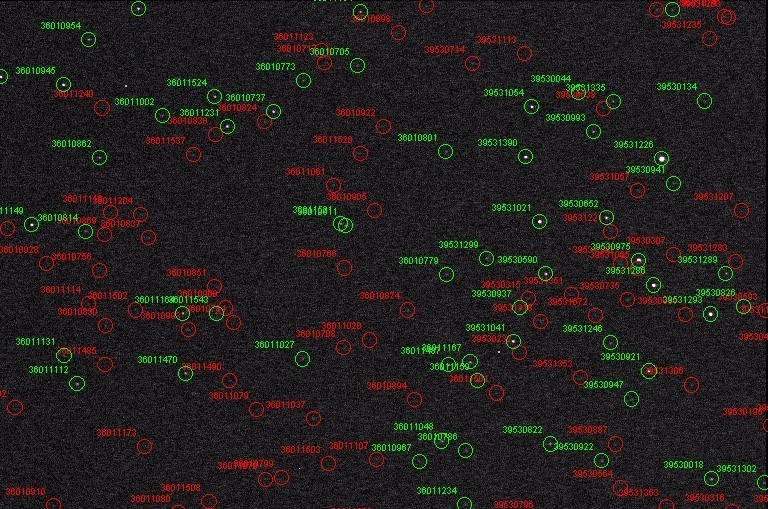
Entscheidend für die Lotrichtungsbestimmung mit einem digitalen Zenitkamerasystem ist die Verfügbarkeit einer echtzeitfähigen Auswertesoftware, die aus den digitalen Aufnahmen des zenitalen Sternfeldes unter Verwendung eines Sternkataloges als Referenz automatisch die Lotrichtungsparameter berechnet. Zur Auswertung der Zenitkameramessungen wurde am Institut für Erdmessung das Auswertesystem AURIGA (Automatic Realtime Image Processing System for Geodetic Astronomy) entwickelt. Es ermöglicht die vollautomatische Auswertung der Messdaten und bietet unterschiedliche Möglichkeiten zur Visualisierung der Messdaten und Ergebnisse. Auf einem leistungsfähigen Industrierechner dauert die Auswertung einer Zenitkameramessung in zwei Lagen zwischen 3 bis 5 Sekunden. Durch die sofortige Verfügbarkeit der Ergebnisse im Felde kann die innere Genauigkeit bestimmt werden. Für die Auswertung von Zenitkameraaufnahmen werden die Sternkataloge Tycho-2 und der United States Naval Observatory CCD Astrograph Catalogue (UCAC3) verwendet.
-
Digitale Zenitaufnahme: Oben das gesamte Bildfeld, die Bilder 2-4 zeigen vergrößerte Sternabbildungen. Der Abbildungsmaßstab der Aufnahmen beträgt 1.86 Bogensekunden/Pixel (Hirt und Seeber, 2002).
-
Digitale Zenitaufnahme
-
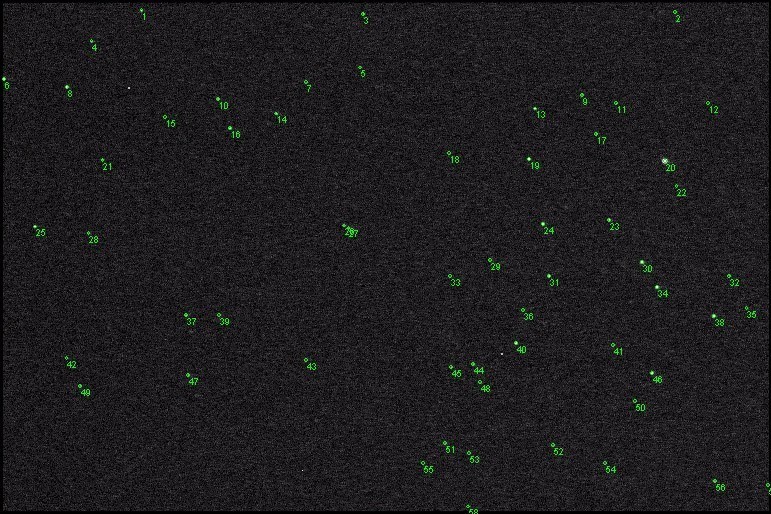
Extrahierte Sterne
-
Sternenfeld aus dem Sternkatalog

Lotabweichungsbestimmungen in Deutschland
 ©
IfE/C. Voigt
©
IfE/C. Voigt
Das Zenitkamerasystem TZK2-D wurde seit dem Jahre 2004 zur hochauflösenden Bestimmung und Validierung von physikalischen Höhenbezugsflächen eingesetzt. In diesem Zusammenhang sind insbesondere die von Dr.-Ing. Christian Hirt durchgeführten hochgenauen Quasigeoidbestimmungen im Estergebirge und im Harz entlang lokaler Profile von etwa 20 bzw. 60 km zu nennen.
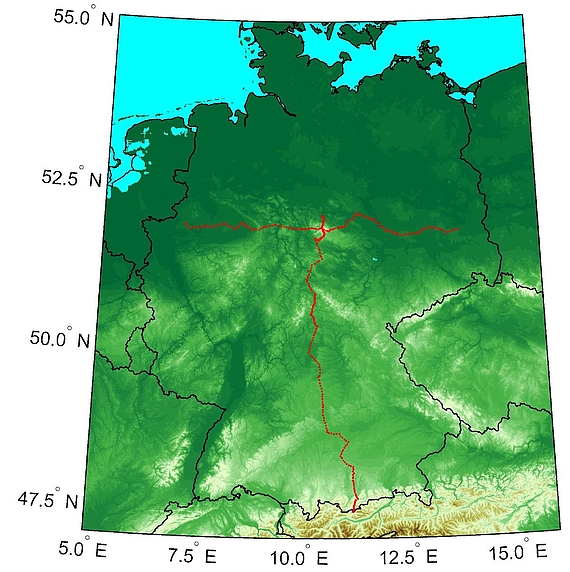
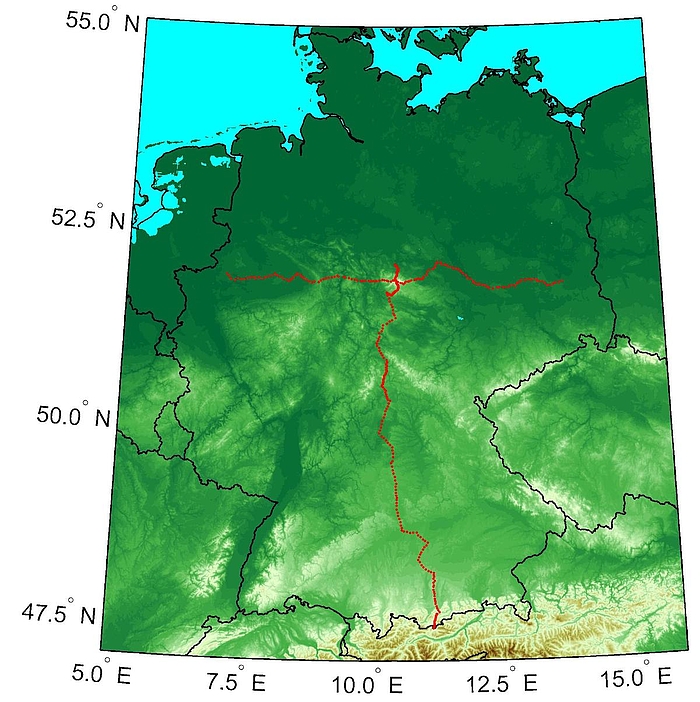
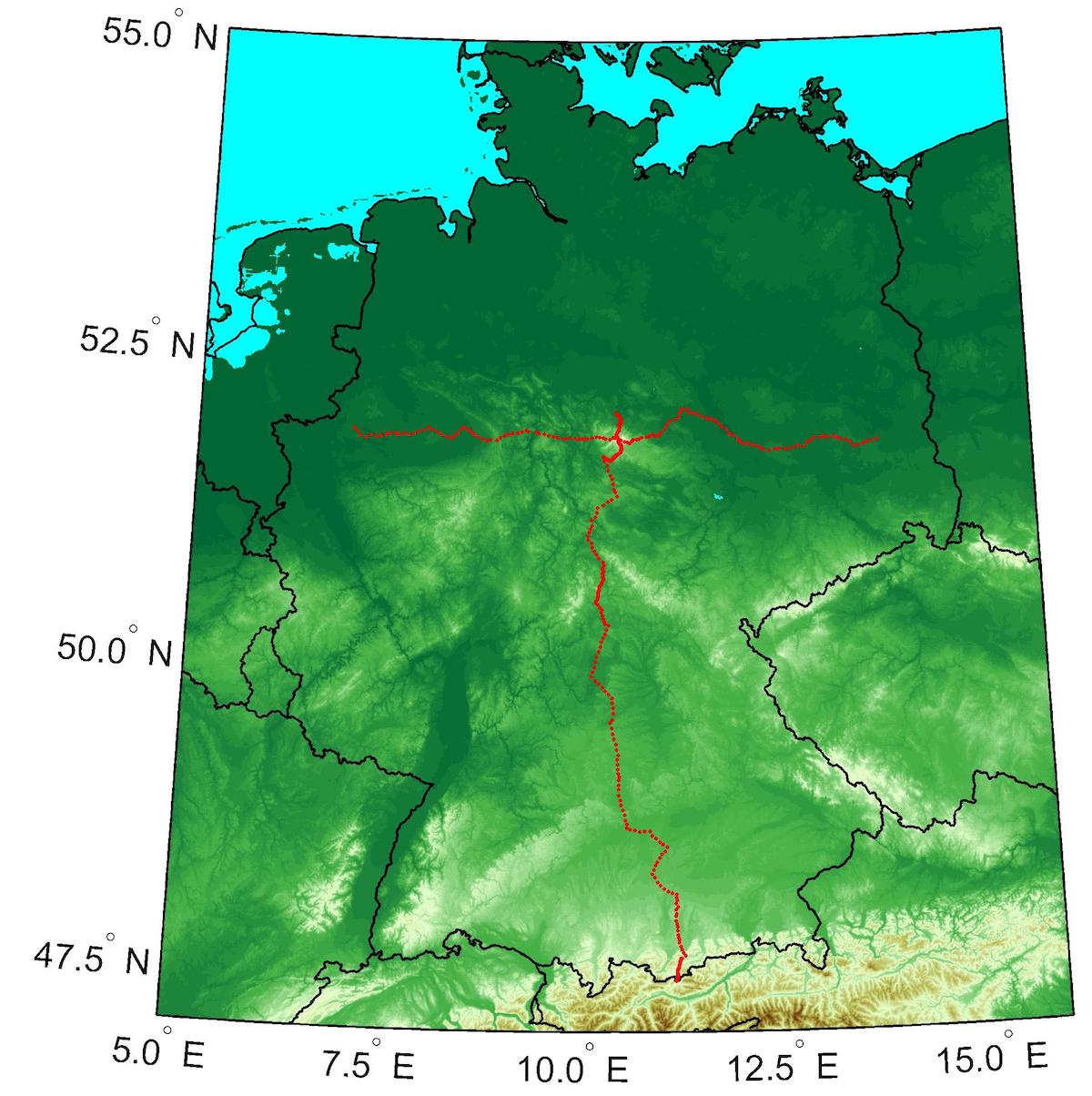
Seit dem Jahre 2006 wird das Zenitkamerasystem im Rahmen des Geotechnologien-Verbundprojektes REAL GOCE zur hochauflösenden Schwerefeldbestimmung entlang zweier regionaler Profile mit jeweils 500 km Länge (siehe Abbildung) eingesetzt. Mit Hilfe dieses Datensatzes erfolgt einerseits die Kreuzvalidierung mit GPS/Nivellementsdaten und gravimetrischen Quasigeoidmodellen sowie andererseits die regionale Validierung globaler Schwerefeldmodelle, insbesondere der Satellitenmission GOCE.
Ausgewählte Publikationen
-
(2002): Astrogeodätische Lotabweichungsbestimmung mit dem digitalen Zenitkamerasystem TZK2-D, Zeitschrift für Vermessungswesen 127: 388-396 Weitere Informationen
-
(2013): Astrogeodätische Lotabweichungen zur Validierung von Schwerefeldmodellen, Wissenschaftliche Arbeiten der Fachrichtung Geodäsie und Geoinformatik der Leibniz Universität Hannover, Nr. 305 Weitere Informationen
-
(2014): Validation of Second-Generation GOCE Gravity Field Models by Astrogeodetic Vertical Deflections in Germany, Earth on the Edge: Science for a Sustainable Planet, Proceedings of the IAG General Assembly, Melbourne, Australia, June 28 - July 2, 2011, International Association of Geodesy Symposia, Vol. 139, Springer, 291-296
DOI: 10.1007/978-3-642-37222-3_38





