Fusion of ranging, accelerometry, and attitude sensing in the multi-sensor system for laserinterferometric inter-satellite ranging (CRC 1128, B02)
| Led by: | Prof. Jakob Flury, Dr. Gerhard Heinzel |
| E-Mail: | gerhard.heinzel@aei.mpg.de |
| Team: | M.Sc. Santoshkumar Burla, Henry Wegener, Dr. Akbar Shabanloui |
| Year: | 2014 |
| Funding: | DFG |
| Duration: | 2014-2018 |
| Is Finished: | yes |
| Further information | https://www.geoq.uni-hannover.de/en/research/b-metrology-and-system-modeling/b02/ |
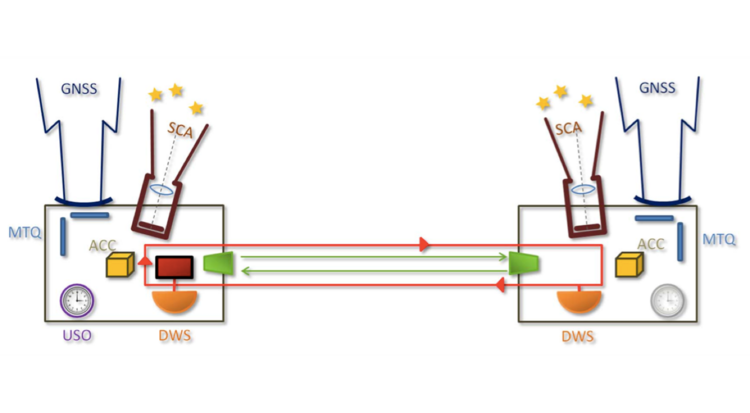
The quality of gravity field results obtained from gravimetric inter-satellite ranging does not only depend on the ranging measurement accuracy. Equally important is the quality of the integration in the multi-sensor system consisting of inter-satellite ranging, GNSS orbit tracking, accelerometry, and attitude sensing, and the performance of this system as a whole. This applies already for the GRACE system but will be even more applicable for GRACE Follow-On (GRACE-FO). The accuracy of the GRACE-FO Laser Ranging Interferometer (LRI) is expected to substantially improve the gravity results but only to the extent that the primary length observable is not contaminated by systematic errors and noise from other components of the sensor system. The system performance is influenced, e.g., by star camera attitude performance, by the strength and characteristics of satellite pointing jitter coupling, by inaccurate knowledge and instabilities of phase centers and alignments, and by accelerometer signal disturbances. Several of these effects are related to influences from the platform and orbit environment.
The goal of the project is to identify improvements in sensor fusion, i.e., in combining the data streams of the multi-sensor system, with the perspective of extracting the best science signals. The project will establish and test a prototype system-level integrated observation model including several tasks: We will investigate the LRI observation model including all relevant physical and geometrical contributions. We will develop the analysis methods needed to extract improved pointing information from the LRI Differential Wavefront Sensing (DWS). We will investigate the combination of the two ranging systems – LRI and microwave K-Band Ranging (KBR) – to assess biases and noise, and to improve the accuracy of KBR data analysis. Finally, we will assess new methods to integrate the available sensor information on satellite attitude and pointing – including star cameras, gyroscopes, DWS, and dynamic attitude control data – which has proven one of the limiting factors in inter-satellite ranging.
The sensor fusion methods will be applicable in the GRACE-FO processing and may be adopted by the involved analysis centers. They will also provide valuable insight for inter-satellite ranging configurations beyond GRACE-FO.





